U0300641 Yeo Choon Wee
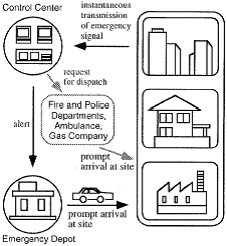
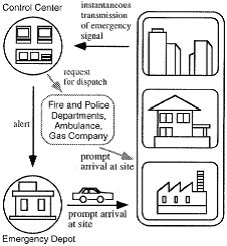 Robot has been used to provide security cover for many reasons. Fundamentally, robot reduces the cost of security patrol as human cost is expensive and the life of the patroller is at risk when there are potential hazards like confronting with an armed intruder or gas leak. By having robots on patrol, the current state of the site under surveillance can be monitored by having humans in the control center and timely reports of dangerous situation can be detected and information send back to the control centre. Alarms can be set off to inform the operator of the situations e.g. fire, gas-leaks, intruder, etc… who will react accordingly. The control could be linked to Police stations, fire stations or even hospital for remedy actions as seen in the figure on the left. [1]
Robot has been used to provide security cover for many reasons. Fundamentally, robot reduces the cost of security patrol as human cost is expensive and the life of the patroller is at risk when there are potential hazards like confronting with an armed intruder or gas leak. By having robots on patrol, the current state of the site under surveillance can be monitored by having humans in the control center and timely reports of dangerous situation can be detected and information send back to the control centre. Alarms can be set off to inform the operator of the situations e.g. fire, gas-leaks, intruder, etc… who will react accordingly. The control could be linked to Police stations, fire stations or even hospital for remedy actions as seen in the figure on the left. [1]
 Robot has been used to provide security cover for many reasons. Fundamentally, robot reduces the cost of security patrol as human cost is expensive and the life of the patroller is at risk when there are potential hazards like confronting with an armed intruder or gas leak. By having robots on patrol, the current state of the site under surveillance can be monitored by having humans in the control center and timely reports of dangerous situation can be detected and information send back to the control centre. Alarms can be set off to inform the operator of the situations e.g. fire, gas-leaks, intruder, etc… who will react accordingly. The control could be linked to Police stations, fire stations or even hospital for remedy actions as seen in the figure on the left. [1]
Robot has been used to provide security cover for many reasons. Fundamentally, robot reduces the cost of security patrol as human cost is expensive and the life of the patroller is at risk when there are potential hazards like confronting with an armed intruder or gas leak. By having robots on patrol, the current state of the site under surveillance can be monitored by having humans in the control center and timely reports of dangerous situation can be detected and information send back to the control centre. Alarms can be set off to inform the operator of the situations e.g. fire, gas-leaks, intruder, etc… who will react accordingly. The control could be linked to Police stations, fire stations or even hospital for remedy actions as seen in the figure on the left. [1]A robot patrolling strategy could be divided into navigation, vision manipulation, emergency sensing and communication. Navigation could be autonomous along pre-determine routes or controlled by operator remotely. The operator understands the surrounding of the robot  through the camera system mounted on the robot. The robot vision can be wide view or the operator can use special eye glasses to see the stereoscopic vision as shown in the figure on the left. [1] Using the sensors equipped, the robot can be use to detect heat, smoke, intruder, etc… A list of sensors is shown in figure below.[2] Some sensors that aid the robot in maneuvering are bumper sensors, laser and CCD camera, and laser range finder for localization. Bumper sensors around the robot also provide cushion when knocked against walls, objects or even human in accordance to the rule robot is program to. Data collected from the robots is sent via communication networks to the control center.
through the camera system mounted on the robot. The robot vision can be wide view or the operator can use special eye glasses to see the stereoscopic vision as shown in the figure on the left. [1] Using the sensors equipped, the robot can be use to detect heat, smoke, intruder, etc… A list of sensors is shown in figure below.[2] Some sensors that aid the robot in maneuvering are bumper sensors, laser and CCD camera, and laser range finder for localization. Bumper sensors around the robot also provide cushion when knocked against walls, objects or even human in accordance to the rule robot is program to. Data collected from the robots is sent via communication networks to the control center.
 through the camera system mounted on the robot. The robot vision can be wide view or the operator can use special eye glasses to see the stereoscopic vision as shown in the figure on the left. [1] Using the sensors equipped, the robot can be use to detect heat, smoke, intruder, etc… A list of sensors is shown in figure below.[2] Some sensors that aid the robot in maneuvering are bumper sensors, laser and CCD camera, and laser range finder for localization. Bumper sensors around the robot also provide cushion when knocked against walls, objects or even human in accordance to the rule robot is program to. Data collected from the robots is sent via communication networks to the control center.
through the camera system mounted on the robot. The robot vision can be wide view or the operator can use special eye glasses to see the stereoscopic vision as shown in the figure on the left. [1] Using the sensors equipped, the robot can be use to detect heat, smoke, intruder, etc… A list of sensors is shown in figure below.[2] Some sensors that aid the robot in maneuvering are bumper sensors, laser and CCD camera, and laser range finder for localization. Bumper sensors around the robot also provide cushion when knocked against walls, objects or even human in accordance to the rule robot is program to. Data collected from the robots is sent via communication networks to the control center.
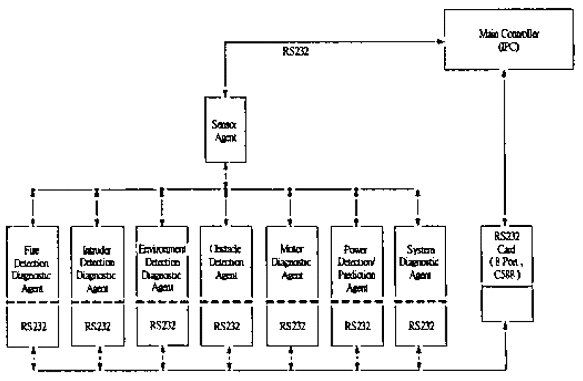
In recent years, Agent technology has been an actively research field for artificial intelligent. An agent perceives the database to be sufficient. It is able to communicate with other agents, and is selfish to pursue its own goals assigned to benefit the user. Under changing condition, an agent must equip with the knowledge of its expected surroundings, goals and behavior and the ability to create new situation specific coordination plans when these expectations are not met. Advantage of having agent system includes the use of distributed resources, performing multiple goals concurrently and reduces the risk of a single point of failure. The use of different agent combination is use to make different decisions for example, temperature sensors, smoke sensors and flame sensors are use to detect fire occurrence while touch sensors, glass sensors, sound sensors and infrared is use to detect intruder. An example of agent system can be seen the figure below.[2]
 Last year, spherical robot is made by Swedish start up company which is robust and can travel on harsh terrain like mud and snow. An animation showing how the robot works is at http://rotundus.se/animation.mpg
The pendulum in the sphere controls the movement of the sphere for example swinging the pendulum to left causes the sphere to move left and swinging to the right will cause it to move right. The company is working towards detecting intruder using the robot. By adding GPS sensor, wide angle camera, information can be fed back
Last year, spherical robot is made by Swedish start up company which is robust and can travel on harsh terrain like mud and snow. An animation showing how the robot works is at http://rotundus.se/animation.mpg
The pendulum in the sphere controls the movement of the sphere for example swinging the pendulum to left causes the sphere to move left and swinging to the right will cause it to move right. The company is working towards detecting intruder using the robot. By adding GPS sensor, wide angle camera, information can be fed back  to the controller. Being spherical, it is less likely to be stuck in a particular area. Future improvement will be driving the sphere upslope as it will face difficulty in moving up stairs. A figure of the sphere robot is as shown on the left.
to the controller. Being spherical, it is less likely to be stuck in a particular area. Future improvement will be driving the sphere upslope as it will face difficulty in moving up stairs. A figure of the sphere robot is as shown on the left.[1] E-journal -A Mobile Robot Testbed with Manipulator for Security Guard Application
[2] E-journal- A Multiagent Multisensor Based Real-Time Sensory Control System for Intelligent Security Robot
No comments:
Post a Comment