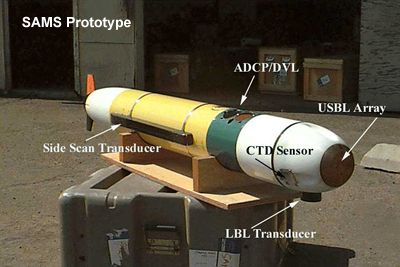
In today’s underwater exploration, AUVs can be use as a oceanographic tools. By using the sensors mounted on the robot, the robot can navigate itself. Most of the AUVs today make use of the Global Positioning System (GPS) technology. These AUVs work in conjunction with surface vessels for navigational purposes. One of these AUVs is underwater gliders is capable of operating unattended for days or weeks, periodically relaying data by satellite to shore, before returning to be picked up due to its ultra low power consumption. When a surface reference such as a support ship is available, ultra-short baseline (USBL) positioning is used to calculate the location of the subsea vehicle relative to the known (GPS) position of the surface craft by means of acoustic range and bearing measurements. Some other longer range AUVs even have GPS mounted on itself to take its own GPS fix. In between position fixes and for precise maneuvering, an inertial navigation system onboard the AUV measures the acceleration of the vehicle and Doppler velocity technology is used to measure rate of travel. These observations are filtered to determine a final navigation solution using localization algorithms.
MTS underwater gliders by
Some AUVs also make use of sensors such as compasses, depth sensors, sidescan and other sonars, magnetometers, thermistors and conductivity probes. These robots employ the technique called Simultaneous Localization and Mapping (SLAM). The SLAM AUVs starts navigation with no prior information and using only onboard sensors, to move through its environment and build a consistent map of its surroundings as well as an estimate
of its own trajectory. These AUVs is becoming more and more popular since there is no wide-coverage underwater GPS equivalent exists (although some small oil and mineral rich areas are well populated with acoustic beacons at surveyed locations).

AUV developed by MIT that uses SLAM
Reference
http://www-pord.ucsd.edu/~rdavis/publications/MTS_Glider.pdf
4 comments:
u0300643 Cheong Chong Kiat
I wonder why this technology has been around for a decade and yet and not many applications/field of areas have been implemented. Is it too expensive to have one that help the human beings in research, other fishing industry???
Since AUV is fully automatic, I wonder if it can find the way back to control center when some accidents happen, such as power is low, or some parts don’t work properly.
U037972H Hoo We Tak
It is due to the computational limit in doing all the computations to localize itself.
I think the oil and gas industry uses AUVs to make detailed maps of the seafloor before they start building subsea infrastructure; pipelines and sub sea completions can be installed in the most cost effective manner with minimum disruption to the environment
Post a Comment