Since 1950, inventions have revolutionised the way we live. Radio, Telephones, Television, Computers, Washing Machines - we've come a long way. Whats the next big thing? Robots. Of course.
Cye, produced by Probotics, is currently the only home robot that can reliably navigate around a home or office. In fact, it navigates better than most research robots which cost upwards of $15,000.
Most robots use range finding and other sensors to move around and avoid obstacles, but these robots never know where they are exactly. On the contrary, Cye uses highly accurate positional sensors to generate a map of home/office, with minimum human help. He can track his movement on a map using a radio link to PC. (A sample map is shown.) Due to this, Cye always knows his exact location and can roam around precisely just like a human.
In order to get Cye installed and running, the first thing is to find an open corner as its base. Attach the radio modem to PC’s serial port, and then install a program called “MapNZap”. After a brief initialization sequence, choose the robot’s orientation relative to the screen, and the direction of the nearest wall relative to Cye. After making the selections, Cye will back off his base, move to the closest wall and bump squarely against it. Then he turns and come back near the base/charger. Now Cye is ready to start exploring.
After roaming around the rooms/office, Cye is instructed to come back to the homebase. The robot rolls through the door from other rooms and right up to the charger. It will be slightly off and miss the charging station. Not perfect, but close enough for a robot. However, Cye will back away, move to the other wall and square against it, then come back and complete a PERFECT dock. Apparently, bumping the wall the charger is on zeroes out accumulated errors on one axis, and bumping the other wall (remember that the base must be placed in a corner) zeroes out errors along the other axis. If Cye can get anywhere near his base, he will dock with his charger every time.
Cye’s navigation success attributes to “Dead Reckoning”, the ability to navigate using positional data only. When it moves to another room, the computer calculates a viable path on the map and sends coordinates for Cye to follow. As Cye moves, his encoder sensors check velocity/distance of each wheel 500 times per second. The telemetry data is sent back to computer so that the robot position can be tracked relative to walls and other obstacles. Probotics claims about Cye’s dead reckoning capabilities, less than 5 degrees of orientation error after 50 feet of travel.
Cye is the best and most affordable home robot on the market.
An amazing navigator: It is the only robot that can reliably find and dock with a charger. Cye uses the corner near its homebase to zero out errors that have accumulated during its journey.
Affordable: It is less than half the cost of its closest competition. Although at a price of US$695, Cye is still much cheaper than other robots, which are priced lowest at US$2000.
Can Vacuum the House: Cye can reliably vacuum every room in a house at any time of the day or night. Cye's new Hoover cordless vacuum cleaner will keep the carpets clean even if you aren't at home. It charges when the robot does, so it will vacuum completely unattended!
Cye is Programmable: It can be programmed in Visual Basic or C++. With a few changes in the powerful but user friendly “MapNZap” software, the robot can go from room to room, play tunes, haul dishes and vacuuming.
Can add extra sensors and motors: Cye’s external port will be able to accept a microcontroller known as Handy Board. This will allow more sensors, motors and LEDs to be attached.
Cye is Educational: Playing with Cye will help people learn about the exciting world of robots and robotics. Both kids and adults will learn about navigation, dead reckoning, programming and many more.
http://www.personalrobots.com/home.htmlhttp://www.pioneernet.net/johnc/cyemain.htm
Xu Xiao U036505H
Cornell University researchers have created a machine that can build copies of it. Though the robots do not perform any useful function yet, they are proof of the concept. This principle could be extended to self repairing which would be a great milestone and work wonders in the Space industry and other hazardous working environments.
Self-replicating machines have been the subject of theoretical discussion since the early days of computing and robotics, but only two physical devices that can replicate have been reported. One uses Lego parts assembled in a two-dimensional pattern by moving along tracks; another uses an arrangement of wooden tiles that tumble into a new arrangement when given a shove.
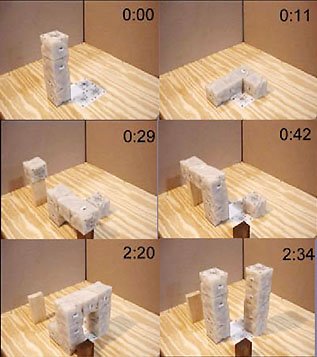
The robots are made up of a series of modular cubes -- called "molecubes" -- each containing identical machinery and the complete computer program for replication.
The cubes have electromagnets on their faces that allow them to selectively attach to and detach from one another, and a complete robot consists of several cubes linked together. Each cube is divided in half along a long diagonal, which allows a robot composed of many cubes to bend, reconfigure and manipulate other cubes. For example, a tower of cubes can bend itself over at a right angle to pick up another cube.
To begin replication, the stack of cubes bends over and sets its top cube on the table. Then it bends to one side or another to pick up a new cube and deposit it on top of the first. By repeating the process, one robot made up of a stack of cubes can create another just like itself. Since one robot cannot reach across another robot of the same height, the robot being built assists in completing its own construction.
Although these experimental robots work only in the limited laboratory environment, the idea of making self-replicating robots out of self-contained modules could be used to build working robots that could self-repair by replacing defective modules. For example, robots sent to explore Mars could carry a supply of spare modules to use for repairing or rebuilding as needed, allowing for more flexible, versatile and robust missions. Self-replication and repair also could be crucial for robots working in environments where a human with a screwdriver couldn't survive.
Vignesh Viswanathan - U045971E
Reference:
http://www.news.cornell.edu/stories/May05/selfrep.ws.html
http://ccsl.mae.cornell.edu/research/selfrep/
www.iser02.unisa.it/papers/67.pdf
Cornell University researchers have created a machine that can build copies of it. Though the robots do not perform any useful function yet, they are proof of the concept. This principle could be extended to self repairing which would be a great milestone and work wonders in the Space industry and other hazardous working environments.
Self-replicating machines have been the subject of theoretical discussion since the early days of computing and robotics, but only two physical devices that can replicate have been reported. One uses Lego parts assembled in a two-dimensional pattern by moving along tracks; another uses an arrangement of wooden tiles that tumble into a new arrangement when given a shove.
The robots are made up of a series of modular cubes -- called "molecubes" -- each containing identical machinery and the complete computer program for replication.
The cubes have electromagnets on their faces that allow them to selectively attach to and detach from one another, and a complete robot consists of several cubes linked together. Each cube is divided in half along a long diagonal, which allows a robot composed of many cubes to bend, reconfigure and manipulate other cubes. For example, a tower of cubes can bend itself over at a right angle to pick up another cube.
To begin replication, the stack of cubes bends over and sets its top cube on the table. Then it bends to one side or another to pick up a new cube and deposit it on top of the first. By repeating the process, one robot made up of a stack of cubes can create another just like itself. Since one robot cannot reach across another robot of the same height, the robot being built assists in completing its own construction.
Although these experimental robots work only in the limited laboratory environment, the idea of making self-replicating robots out of self-contained modules could be used to build working robots that could self-repair by replacing defective modules. For example, robots sent to explore Mars could carry a supply of spare modules to use for repairing or rebuilding as needed, allowing for more flexible, versatile and robust missions. Self-replication and repair also could be crucial for robots working in environments where a human with a screwdriver couldn't survive.
Vignesh Viswanathan - U045971E
Reference:
http://ccsl.mae.cornell.edu/research/selfrep/
http://www.news.cornell.edu/stories/May05/selfrep.ws.html
A diving accident had nearly caused a 13 yr old girl to lose her both legs. Her legs couldnt move for five weeks. And when the doctors predicted that she had only 10% to 30% of walking two years after the injury, it was too much for that young and sporty girl to handle....
Just when she was feeling depressed, her HOPE came. The LOKOMAT. the beacon in the sea of darkness.
That young girl was trained with LOKOMAT for eight weeks. This Swiss-manufactured exoskeleton robot delivers power to her hip and knee joints, and strapped her legs onto the machine. She was then suspended over a treadmill, which her repetitive walking (training) takes place.
8 weeks past. Guess what?! That little girl was able to walk 250 feet! Amazing ya? LOKOMAT has proven the statistic wrong. LOKOMAT had strengthen her legs. LOKOMAT had removed that girl from the wheel chair. LOKOMAT has became her saviour.
what is LOKOMAT?
Lokomat is actually a robotic gait orthosis and it is used together with Lokobasis (body weight support system) and a Woodway treadmill to perform rehabilitation to people with paralysis, especially those with partial spinal cord injuries. The Lokomat would move the patient's legs in a walking pattern repetitively and this kind of training, in time, can assist patients to regain his/her functional walking patterns.
How does it operate?
During the training, the patient’s hip and knee joint ankles would move and be guided according to a pre-programmed physiological gait pattern.. Each of the four joints is constantly monitored by the Lokomat’s software to ensure that they are precisely held to the predefined gait pattern. The computer controlled guidance also allows individual adjustments of different gait parameters. You may like to refer to the below clip for better understanding. :>
Other benefits
Besides rehab purposes, there are several other benefits as well.
1) Regular therapy can prevent limbs from deteriorating, by strengthening muscles and bones of the lower limbs. Also, weight-bearing exercise helps individuals with paralysis to ward off the threat of osteoporosis.
2) It can help to relief the therapist. Instead of conventionally carry the patient to walk on the walking bars with three other helpers, the new robot would only require one assistant to monitor and run the machine. As such, with the help of rehab machines, the therapist would be leaving soon.
3) It is also believed that Lokomat is useful for patients with other neurological diagnoses such as multiple sclerosis, cerebral palsy and Parkinson.
LOKOMAT is not an antidote that can cure paralysis in one day. However, LOKOMAT gives the hope to people. And it is through consistent and repetitive training before wonders can happen. :>
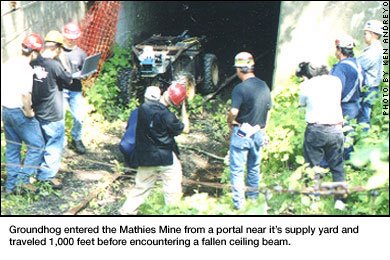
Groundhog is a mine-mapping robot developed by Carnegie Mellon University (CMU) in response to a mining accident due to inaccurate maps.
Its objective was to explore and map a large abandoned coal mine accurately and reliably, so as to ensure safety of the miners.
Groundhog is equipped with:
-tiltable SICK laser range finders to obtain scans efficiently
-cameras, tilt, gas and sinkage sensors to obtain data
-a gyroscope to allow it to get through the obstacles and the different terrains within the mine
-a wireless video system for data obtained to be seen by the team outside the mine
Groundhog makes use of the perception technology - Simultaneous Localization and Mapping (SLAM), to derive maps from the data obtained in real time. With autonomous and mapping technology, Groundhog has to make decisions by itself on how and where to go, and to return outside with the required information.
The hallmark of Groundhog and its incorporated technology came when it encountered a fallen beam, and made the right decision to retreat. Under development, this was an unforeseen situation. Yet through Groundhog’s own analysis, it decided the beam was unsafe to cross, and appropriately retreated.
I think this is an excellent example of how autonomous robotics can be incorporated into real-world situations. With further development, robots like Groundhog can help ensure safety of workers in mining and in other areas such as deep sea excavation.
Carnegie Mellon University(CMU) recently developed an underwater robot named Deep Phreatic Thermal Explorer (DEPTHX). This autonomous underwater vehicle is 2 meters in diameter and weighs about 1300 kilograms. DEPTHX is a four degree-of-freedom autonomous underwater vehicle,it can spin and move in any direction, and due to the fact that it has very high buoyancy and very low center of mass, it is ideal for underwater exploration as it is extremely stable when floating upright.
The software used for navigation and mapping is simultaneous localization and mapping, or SLAM, developed by Associate Research Professor David Wettergreen of CMU. SLAM allows the vehicle to build a map of its three-dimensional surroundings, and this helps to determine the vehicle' location easily in the bottom of Zacaion Cenote. Besides, the map also carries information on the water temperature and salinity levels.
In February 2007, DEPTHX successfully exlored a 115 meters deep sinkhole in eastern Mexico, and this May, the team is planning a expedition to Zacatone Cenote in central Mexico, which is over 300 meters deep. Previous explorations into Zacatone Cenote have not gone deeper than 50 meters. The goal of this exploration is to study the sinkhole's underwater environment and to discover what kinds of organisms are still living in the deepest sink hole in the world, at the same time also creating-dimensional map of the sink hole.
DEPTHX is designed for unexplored territory, where there is no external navigating. Using its autonomous navigation, robot can go to places where human could not possibly go due to its extreme environmental condition.
Exploring the deepest region where no one has gone before seems to be a big expedition, however, all these are actually preparation for seeking life on Europa, an ice-covered moon of Jupiter.
Stroke patients usually suffer from the loss of motor functions like walking independently. Chicago PT has developed KineAssist technology which is a rehabilitative robotic system that aids therapists in rehabilitative sessions. The system provides patients recovering from stroke an omnipresent safety net that catches them when they fall. This allows the therapist to improve the quality of the session by providing more realistic training scenarios instead just preventing the patient from falling over.
The system is able to follow the patient allowing the patient to move around freely without feeling any extra weight. The harness is the interface connecting the machine and the patient. This tracking of the patient’s motion is done by force sensors in the harness. This allows for control of the robot which reacts to the patient’s movement and also the ‘catching’ of the patient when he falls over. In this sense the system is more of a reactive agent that only reacts to external stimulus.
Another feature that stands out is that the machine can lift the patient reducing the load on the patient’s legs. This allows for progressive training which could not be achieved by past rehabilitative methods.
Voice control or a wireless remote control could be built into the system to allow the therapist control the robot’s functions without endangering the patient with excess wires.
Further applications for this technology include creating this ‘safety net’ for gym users who train alone or for athletes who challenge themselves with heavier weights.
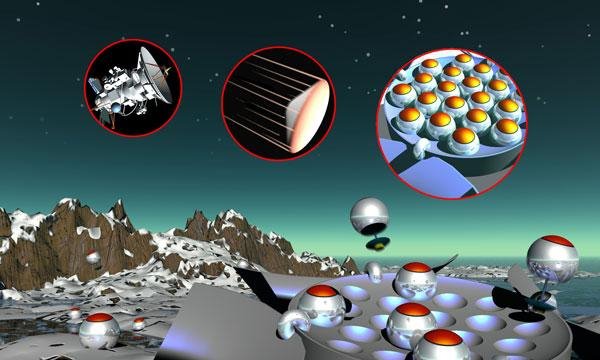
Exploring planets like Mars with robots are expensive and time consuming. The success of a mission is linked to the survival of a single robot. Therefore the idea of a swarm of small cost-effective robots are appealing. Since the loss of a few units won't necessarily lead to the failure of a mission. Dr. Penlope and Dr. Steve Dubowsky have proposed a design of multiple jumping robots the size of tennis balls. All equipped with a camera and communication systems. Orientating themselves and other units to perform a intelligent collective autonomous behaviour. Each unit carrying a few instruments adding to the swarms ensemble. So that the swarm will have the ability of adapting to and investigating the environment.
In December 2005 NIAC the NASA Institute for Advanced Concepts awarded the idea with the Phase II grant. So that the inventors could develop the design and testing it on earth.
The jumping motion will be ensured by letting the robots be weighted in one side so that they always will come to rest in a specific orientation. They will also be able to control their direction and perhaps even able to perform a rolling motion.
A example of the benefit of the swarm idea is the ability to adapt to terrain. As an example the units could be used exploring caves on Mars with a great chance of extracting themselves out of the caves when they have investigated it. To enter the caves and still remain i contact with the earth the units could be used as relay points allowing a network to stretch into the cave.
Filip Wistrand
NT061734A
Being hospitalized can have a severe impact on children's education as they are cut of from school. Missing out on just a couple of months classes can make a big difference, and cannot always be replaced with home tutoring. But now there is a solution called PEBBELS (Providing Education By Bringing Learning Environments to Students). It is essentially a robot thats takes your place in the classroom, relaying the images and sound of the teacher and the class to your bed at the hospital. When the first class is over it moves on to the next classroom or stays at the lockers giving you an opportunity to chat with your friends.
The system works with two robots, one in the school and one at the hospital. The school one is remote controlled by the child, making it look and walk around and even raise its arm to answer questions. As for interface, one 15-inch monitor is placed on each robot, showing what the other robot is looking at making two way communication possible. This makes both the student and the teacher feel like the student is present in classroom. The robot also has ability of scanning and printing documents making paperwork not only staying in the classroom.
This is something that have proven to have a good effect on students ability to keep up with school while being in the hospital and the robots have even been accepted as the students themselves by fellow classmates. These new types of learning aids are an improvement for all sick children and is going to increase in popularity as they get cheaper.
Close your eyes and imagine: In an operating room, a patient is draped and anaesthetized on a table. The other humans – doctors and nurses- are masked and in gowns. A metallic assistant, perhaps a distant cousin to R2D2 of "Star Wars" fame, is standing by. The surgeon calls out for instruments:
Scalpel.
Scissors.
Retractor.
Kelly clamp.
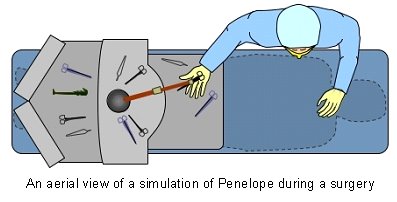
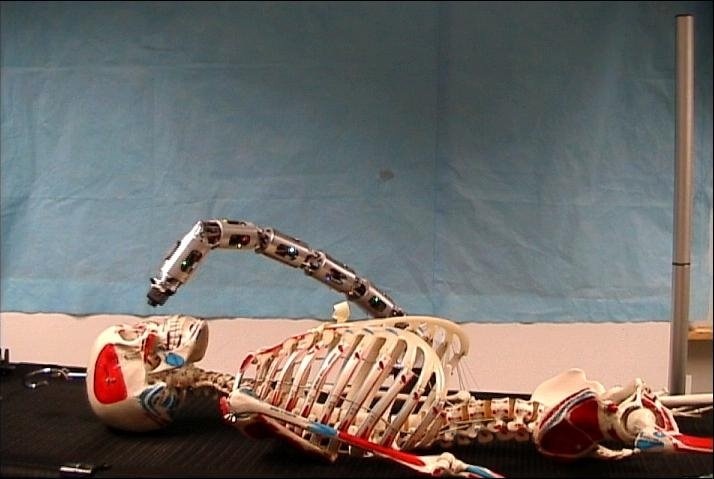
And here is when science fiction starts blending eerily into a new health care reality: A slender robotic arm reaches toward a tray. And with each command, "she" hands instruments quickly, efficiently, correctly.Meet Penelope, the new scrub nurse at New York Presbyterian Hospital in Manhattan: a robot with a job that in many hospitals is held by humans with college degrees. Penelope is not just any old robot, but one blessed with artificial intelligence, an ability to "see" and the capacity to "hear."
June 16, 2005 marked the day when Penelope became the first robot, to work as an independent assistant to the surgical team at the New York Presbyterian Hospital in the removal of a benign tumour. Penelope is equipped with a voice recognition software, allowing the surgeon to ask for the tools in a normal manner, and uses its robotic gripper to place the tools in the surgeon’s arms. Once a particular instrument is used and laid down by the surgeon, Penelope uses her digital cameras and advanced image processing software to recognize it and place it back in its correct position. Penelope even uses a software that helps her predict what require next and keeps track of the instruments used during any surgery.
The Penelope system has four major hardware and software components :-
A 5 degree-of-freedom robotic arm with an electromagnetic gripper
An instrument platform that consists of sterile horizontal surfaces to store instruments
The System Stand that allows positioning of Penelope
The System Software that includes voice recognition and image processing routines
RoboNurses like Penelope can help in the serious manpower shortage faced by the health services industry, while helping save time and increasing efficiency in the operating room. Her human co-workers feel she is not a replacement to human nurses, but rather a great boon that can help the human nurses devote more time tending to patient needs. Costing as little as a portable X-Ray machine, Penelope will soon be a common sight in many operating theatres, enhancing the services of the healthcare industry.
Domestic service robots have long been a staple of science fiction and commercial visions of the future. The robot V.I.C.I in the mid -80’s TV show Small Wonder and Issac Isimov’s book I,Robot which was consequently made into a movie bear testimony to the same. Commercially too, this area has evoked a lot of interest with most big universities and research organizations devoting huge resources to the development of their own robot for different applications. But the question is how soon will robots become part of our day-to-day lives. According to the International Federation of Robotics, about two million personal robots were in use around the world in 2004, and another seven million will be installed by 2008. In South Korea the Ministry of Information and Communication hopes to put a robot in every home there by 2013. The Japanese Robot Association predicts that by 2025, the personal robot industry will be worth more than $50 billion a year worldwide, compared with about $5 billion today.
Most commonly these imaginaries take the form of humanoid assistants capable of performing multiple tasks and engaging in fairly sophisticated communication and interaction with people. But more recently, an entire new range of robots are being developed which do not take the humanoid form and focus on specific applications such as the iRobiq and Robomovers discussed in this blog.
One such popular robot is the iRobot Roomba vacuuming robot. The Roomba is a “robotic floor vac” capable of moving about the home and sweeping up dirt as it goes along. The Roomba is a logical merging of vacuum technology and intelligent technology. The Roomba undertakes three types of cleaning, using two rotating brushes that sweep the floor, a vacuum that sucks dust and particles off the floor, and side sweeping brushes to clean baseboards and walls. Infrared signals are used to determine the Roomba’s current location in a room, and to ensure that it does not fall down stairs or off of raised floors. A set of sensors is also used to determine dirty places on the carpet that need more attention. The Roomba returns to a self charging home base after the floor is clean or when it needs to recharge. Typically, it can clean about three 14 x 16 foot rooms before doing so. Inexpensive contact sensors or infrared sensors are most frequently used, along with simple heuristics to follow random motion patterns.The Roomba navigates a space based upon a predetermined pattern. However, this pattern is altered whenever the Roomba bumps into an obstacle and it changes its course. This introduces important variability in the Roomba’s movement and helps to achieve greater coverage. But one major disadvantage or drawback with this robot is that unlike most conventional robots it is not capable of planning or learning and at times needs human intervention to help clean inaccessible areas.
Author: Vignesh Ramachandran
Matric Number: U037024R
References:
1.Service Robots in the Domestic Environment: A Study of the Roomba Vacuum in the Home - Jodi Forlizzi et al
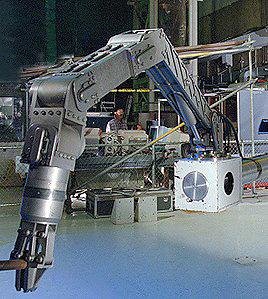
One of the areas where robots have a very important role is in the building of the International Space Station (ISS).ISS is a research facility being built in orbit under collaboration of NASA, Canadian Space Agency (CSA), European Space Agency (ESA), Russian Federal Space Agency and Japan Aerospace Exploration Agency (JAXA).The assembly of modules and maintenance of the station require Extra-Vehicular Activities (EVA) performed by the astronauts. These are usually expensive and dangerous. This is where the robot manipulator comes in to rescue. The robot manipulator can help perform most of the common repairs and operations without the astronaut ever setting foot outside the ISS.
At present ISS is equipped with Mobile Servicing System or Canada Arm 2.It was built by MD Robotics in Brampton in Canada. It is an improved version of the Canadarm 1 i.e. the Space Shuttle Manipulator. Canadarm 2 is 17.6 meters long when fully extended. It has seven motorized joints, hence seven degrees of freedom and its joints can rotate 540°. It has a mass of 1,800 kilograms and a diameter of 35 cm. The arm is capable of handling large payloads of up to 116,000 kg. The length of the links and the rotational freedom give the manipulator a large working volume. Its ability to handle large weights help in assembling the ISS module, transporting cargo from one end of space station to the other or even help space shuttle dock by gently manoeuvring it into the right position. It is also useful in placing astronauts safely on any location on the ISS. Redundancy has been introduced into the manipulator arm in the form of 2 motors per joint as it is expected to be in service for next 15 years and hence should be able to function in spite of damage.
One of the amazing features of the manipulator is its Mobile Base System (MBS). Unlike most of the manipulator systems that have a fixed base, MBS allows the manipulator to move around on the external truss of ISS. MBS acts as a platform for storing payloads while astronauts work and has 4 grapple points for the robotic arms to attach. The manipulator has Latch End Effectors (LEE) on both ends that help it attach it to the Power Data Grapple Fixtures (PDFGs). PDFG supply power and data to the robot arm and are spread around on the surface of the work station. The manipulator arm can relocate itself in an inchworm fashion by going from one PDFG to another using both its ends or it can use the MBS.
The sensors on the manipulator include 4 colour cameras to supply video data to the astronauts and force moment sensors which give it a sense of touch. The manipulator arm can also automatically detect collisions about to happen and avoid them. The control of the manipulator can be done by the astronaut or it can work autonomously for minor tasks.
More manipulators are expected to be added to the ISS. The future robot arms will help build large work stations and will make full use of the gravity less environment for energy efficiency e.g. SkyWorker. With help intelligent and efficient tools space colonisation will be much safer and faster.
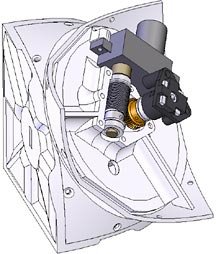
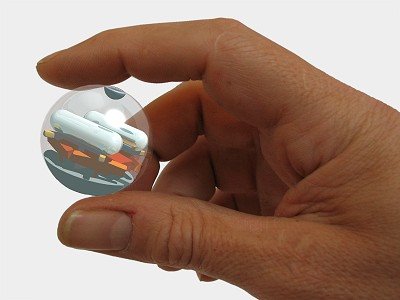
The typical security robots that you see publicised these days are usually from japan or korea and basically is like a R2D2 that travels on 4 wheels. Rotundus is a swedish company that thought out of the box and introduces a security robot that is an entire sphere.
What's innovative about this robot is its propulsion system. It is powered by a pendulum inside the sphere. When the pendulum is displaced from the center of the sphere, the ball will move along the direction of the pendulum. As such, it can move in virtually any direction.
A sphere shape means it's fast too. Little point of the contact with the ground means little friction. It can also tackle any terrain from snow to grass to concrete. No need to get stuck at corners either
This robot was developed by Ångström Space Technology Center, part of Uppsala University, Sweden, and meant to be used in space. But people also realised that it can be used as a security robot back on earth. Plenty of space inside the sphere to put cameras, microphones and various sensors to fulfill its purpose as a security robot. All you need to do is set its patrol route, and it'll follow by using GPS.
It's still in prototype form though, and the finished version would have improved GPS, radar, alarms, and a better powered pendulum to enable it to go upslope. That's alot of improvements that need to be made, but the basic concept shows a lot of promise.
Now imagine this as a gps-enabled bowling ball and the things you could do with it. Perfect score!
In the nuclear industry, humans are not able to withstand high levels of radiation without any adverse side effects. This is where I feel robots can come in and perform a niche role, to fulfil what humans are not able to do. In this industry, robots can perfrom different roles from maintenance work, such as simple manipulation or transportation of radioactive materials, disaster recovery at radioactive sites, and dismantling or assembly of nuclear weapons.
The core of a nuclear reactor is often located underwater and hence robots must be capable of underwater motion. One such example is of a robot developed in China by the Chinese Academy of Sciences. It is equppied with a vision system and capable of searching and operation. It also has a vacuum pump such that it can suck up small items for clean up purposes, and also equipped with a gripper to hold spanners or screwdrivers and can be utilized for maintenance or repairs.
Robots in such an industry could become increasingly more advanced such that they can become autonomous and for example, can carry out the daily tasks of running a nuclear reactor. I believe this will allow the removal of humans from the radioactive site and ensure that the safety of the workers at such a reactor is not compromised. In existing nuclear plants, the robots must be capable of stairs navigation and such a robot is developed in India, whereby it is six legged and capable of moving around and over obstacles. In my opinion, the robot from China is limited to certain places and not capable of complex navigation due to it being wheel-based.
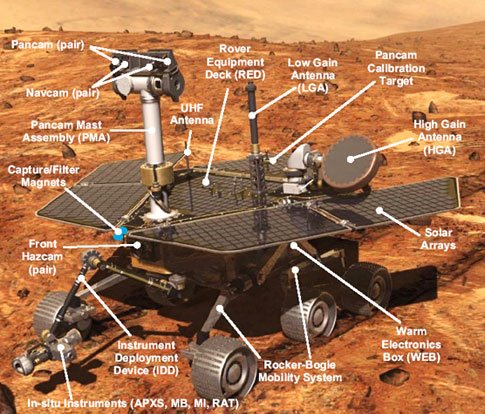
Perhaps the most widely followed robots are those used in the Mars Exploration Rover(MER) Mission. Spirit and Opportunity became the newest participants of this mission when they were launched in 2003, joining two Viking Landers launched in 1976 and Pathfinder in 1997. The total cost of building, launching, landing and operating Spirit and Opportunity on the surface for the initial 90 day primary mission was about US $820 million.
The instruments carried by them include a Panoramic Camera (for determining the mineralogy, texture, and structure of the local terrain), magnets (for collecting magnetic dust particles), a Microscopic Imager (for obtaining high-resolution images of rocks and soils) and a Rock Abrasion Tool (for removing dusty and weathered rock surfaces).
Sorry to remind every one of our course work but one of the notable features of the rovers are the technologies used for autonomous planetary mobility that enable the rovers to make decisions and avoid hazards on their own. The system takes pictures of the nearby terrain, generate 3-D terrain maps and then plot dozens of possible paths before the rover chooses the shortest, safest path toward the programmed geographical goal.
The rovers may be light years away from us, but they are constantly improving as new software is uploaded to them frequently, applying whatever new knowledge we learn back here to help them in their mission. Even so, much technological advancements are made in hardware and could not be implemented to Spirit and Opportunity. Therefore, NASA has planned for another rover called the Mars Science Laboratory to be launched before the turn of the century. Despite the name which lacks inspiration, it will be packed with the best in navigation and exploration technology.
An increasing use of medical robotics is in the battlefield where medical robots are used to treat soldiers who are wounded in the frontline. One example of such robots is the Life Support for Trauma and Transport (LSTAT) /Snake Robot. The LSTAT is a portable surgical platform (stretcher) which integrates various state-of-the–art medical devices. LSTAT incorporates many functions of the Intensive Care Unit (ICU) such as a defibrillator, providing oxygen supply, analyzing blood, suction and physiological monitoring. These high-tech stretchers are currently being used by the US Army in Iraq and Afghanistan.
To further enhance the capability of the LSTAT, CarnegieMellonUniversity is working with the US Army’s Medical Research Department to integrate a snake robot with the LSTAT. This snake robot is capable of diagnosing and treating wounded soldiers on the spot, hence minimizing battlefield casualties as most fatalities occur due to late treatment being given. The snake robot is basically a serpentine arm(s) (think Doc Oc in Spiderman) which is capable of performing various medical functions such as:
serving as a third hand for the medic
moving an ultrasound probe under the control of a remote physician
spraying antiseptics and antibiotics onto wounds
At present, Carnegie Mellon researchers have integrated built-in cameras onto the snake robot which allow for the inspection of a patient by remote physicians. The cameras which are mounted onto serpentine arms are preferred over the conventional method because it requires less sweep volume. Telemedicine (remote surgery) requires a dedicated connection bandwidth in order to minimize data lagging, which may affect the co-ordination between the doctor and the robot, hence affecting the patient. This has been resolved as LSTAT’s hardware capability is more than sufficient to handle the bandwidth issue.
How are military medical robots like in Singapore? Last checked, they are relatively underdeveloped compared to the US. The various collaborations made between DSO, the local universities and the Singapore Armed Forces rarely involve medical robots. The potential of the snake robot is tremendous as it is potentially able to perform many medical functions. The US Army has provided research grants to various universities for further development of the snake robot. Perhaps one day, it will be able to perform surgery right on the spot, with minimal assistance from a remote doctor or medic.
This assistive robot has been invented in 2005, and it has the potential to help older people or those with disabilities to walk or lift heavy objects.
HAL is created by Professor Yoshiyuki Sankai of the University of Tsukuba in Japan. He has integrated mechanics, electronics, bionics and robotics in a new field known as cybernics.
See the picture on the left. HAL is able to assist a person even when walking on stairs, and the latest HAL 5 is able to assist the arms in carrying heavy things.
HAL is controlled by neuro-signals. The system consists of bio-sensors placed on the surface of limbs that will sense the electric pulses that is transmitted from the brain to the muscle, and move the motor parts for that area. That translates to the wearer of the system doing less work than normal. Also, due to the fact that the system is able to react faster than the human muscles do (time needed for muscle to react to the signal), the person will not feel like he is trying to move a heavy limb.
Also, the system is able to 'learn' how the wearer moves. The initial run, the system records the person's posture and pattern motion in its database so that they can be use to better assist the person in future movements.
This system has alot of potential. I list them out here:
rehabilitation purposes, to help people recover from lost muscle functions
search and rescue missions, and applications where strength is required
military applications, so that soldiers will be less tired
with brain-computer interfacing, even people who has lost their limbs can use this system to aid in movement.
many many more (can't think of any now. Any suggestions?)
I think this assistive limb is still not available commercially, but a website has estimated the price to be between $14 to 19k.
I think this is a very nice innovation, as it can help alot of people in their daily activities. However, what will this world be like if everyone wears one? Imagine people running around in these 'power suits'...
Posted by Foo Jit Soon: U059592R
The Dorado class AUV is 21 inches in diameter and can be as short as 8' or as long as 21'. This robot can map the seafloor with higher resolution than is possible with hull-mounted or towed sonar systems.
The MBARI Mapping AUV is a torpedo-shaped vehicle equipped with four mapping sonars that operate simultaneously during a mission. The sonars are a swath multibeam sonar, two frequencies of sidescan sonars, and a sub-bottom profiler. The multibeam sonar produces high-resolution bathymetry (analogous to topography on land), the sidescan sonars produce imagery based on the intensity of the sound energy's reflections, and the subbottom profiler penetrates sediments on the seafloor, allowing the detection of layers within the sediments, faults, and depth to the basement rock. The vehicle is launched on programmed missions and runs on its own battery power until it returns to the ship, as programmed, for recovery.
Such robots are great for such underwater explorations. Compared to a human being, they have better underwater capabilities- they last longer underwater, have increased depth explorations and also have better detection mechanisms. The main thing is still safety when such robots are concerned, as using such robots reduces the chance of a fatal accident happening to zero.
Also, I believe that such AUV robots will have great potential uses, for example, the study of hurricanes, coastal erosion, ocean exploration and fisheries stock assessments. As a student who is particularly interested in defence technology, I also believe that such robots will be able to employ anti-mine technology and also improved submarine detection. Current technology has already acquired some of the above "skills", but such "skills" are not perfected as the robots will still make errors like a human. Thus, much work is still needed on robot recognition so that differentiation between background and the surrounding objects can be done without errors. There is so much that can be done to improve AUVs, but due to the limitations of present technology, the problem still exists such that the "skills" of the AUVs are limited too.
There is also a Singapore Robotic Games competition which involves underwater robots: http://guppy.mpe.nus.edu.sg/srg/urc.pdf . Such competitions promote the research in such categories of underwater exploration and thus will be able to spark potential engineers to create even better AUVs.
Mai Kaojie, U0307803@nus.edu.sg
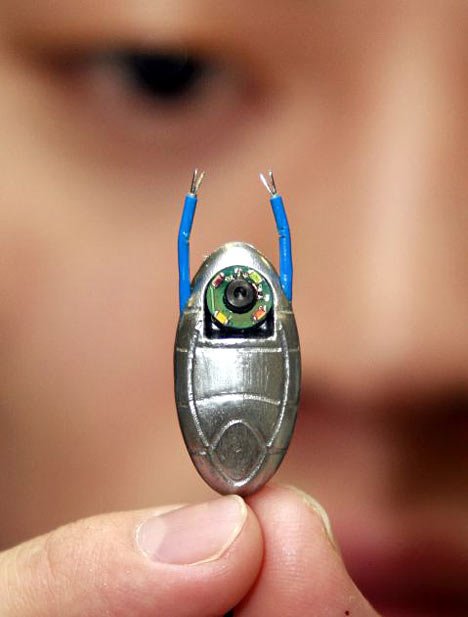
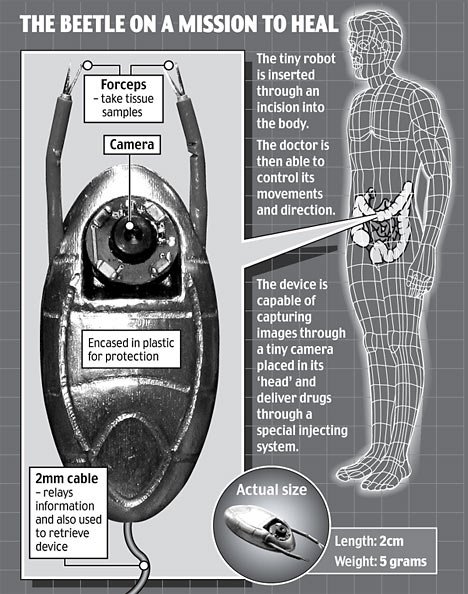
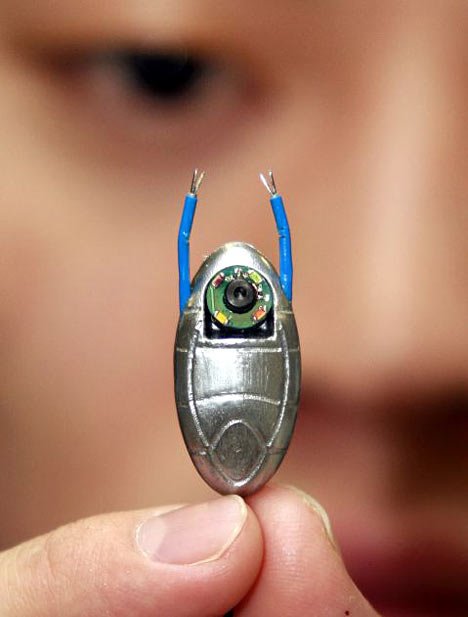
A new micro-bot, jointly created by Ritsumeikan University and the Shiga University of Medical Science in Japan, is believed to be the next weapon in the war against cancer. It is designed in the shape of a bug with just an inch long. With its small body dimension, it can be inserted easily through a small incision. The metal device is encased in plastic less than half an inch wide and protects the components while inside the body.
This bug had a few amazing features. Firstly, it is able to capture images with a tiny camera which is mounted on its head. Secondly, it can deliver drugs through a special injecting device. Thirdly, it had tiny forceps for taking sample tissues. Future developments may enhance these forceps' capabilities to sever cancerous cell. Compare to radiotherapy which may damage the healthy cells while killing the cancerous cell, this method is safer because of its precision in removing cancerous cell. Last of all, the bug is connected to the computer by a cable. This cable relays data back and forth to the computer. The data could be in the form of images which is captured by the tiny camera or instructions to control the movements of the bug. In case the bug gets "lost" in its course, the cable acts as a "safety line". The future for these bugs could likely be in the battlefield. Small and versatile, they could be a great assistant to field medics. Such a day could be far, but often imagination from past science fiction is right here in our reality world.
References: Daily mail, science and technology, "Robot that roams the body to seek and destroy cancer"
U036185J Lin Changjie
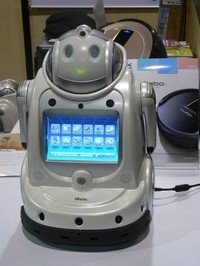
Presenting to you iRobiq, the latest all-in-one robot which provides education, entertainment, security and daily life management in the house, unveiled at the world’s largest technology trade show this year!
iRobiq can wake you up every morning and deliver up-to-the minute news, weather, sports, and stock market information. As an entertainment machine, it allows you to take and watch photos, videos or even sing karaoke with it. Kids will love iRobiq as it can tell preloaded stories or even dance to nursery rhymes. Coupled with a camera and wifi capabilities, the surveillance mode allows live photos to be sent via email whenever it detects human presence. Thus, fret not if you feel uncomfortable about leaving your kids or elderly at home while outside the house. iRobiq can also control other robots to perform cleaning tasks and recharges itself. iRobiq is to become an integral part of the family. Here is a video of iRobiq in action.
In my opinion, the iRobiq can be further developed to have legged locomotion to overcome the many obstacles found in a home. It should also be able to perform tasks like fetching things. Home robotics has evolved from automatic cleaning robots, to robots with voice and face recognition capabilities that can cater to the different needs of a family. What’s next? A robot that can cook us a meal; listen to our problems and give advice? The future beholds and with the rapid development in robotics, it is not that hard to imagine.
References:
Tech Digest CES 2007: http://techdigest.tv/2007/01/ces_2007_irobi.html
Yujin Robot: http://www.yujinrobot.com/product/irobiq.php
Voila!! A new accessory for our favourite iPod. The iDog is a robot dog that exhibits behaviours and learning ability. It is designed and manufactured by Sega Toys. It is also manufactured by Hasbro which provides the iDog to North American audiences. It is also marketed as the eDog in Germany and the Netherlands.
The iDog reacts to music from an external source like the iPod and will work with any MP3 device from a 3.5mm audio jack input, and has an integrated speaker. It also reacts if placed near an audio source and has 70 built-in melodies.
All these interactions with humans are enabled with a number of switches and sensors on its nose, head and tail which allow it to react to user input.
Currently, iDog comes in various kinds of colors and designs to enhance its popularity.
I personally finds this iDog very interactive as it ‘feeds’ on the music that I played to him. Whenever an user pats it on the head or “feeds” it lots of music, at least 5 minutes every hour, iDog will show lots of flashing lights to signal that he is in good mood. However, if an user neglect him, iDog’s mood will change from excited to sad. Moreover, it also barks to let a user know that he is hungry for more music. It features seven flashing LED lights on its face that shows an user his mood and personality with tons of blinking lights patterns. In a way, it behaves like an actual dog as it requires the owner’s constant attention. iDog's built-in speakers can be switched off by flicking his tail, but he will give a deep growl when an user deprives him of music.
Following the huge success of the cute iDog, Sega comes out with more pets like iDog-Pup, iCat, iFish and iCY. And the best thing about them is that they love music. I cannot wait to be an owner of iDog as it brings some much fun and entertainment at a mere price of USD$29.99.
It is interesting to note that by the end of 2005, robotic lawn mowers are the second largest category of household autonomous robots used. One of the best-selling robotic lawn mower is Robomow by Friendly Robots, an Israeli company.
Basically, you have to first peg a small wire to the ground around the perimeter of your lawn, defining the area to be mowed. It is a one-time set-up and will be covered by growing grass quickly.
Robomower uses sophisticated tiling algorithms to calculate the most effective pattern for mowing the entire lawn. The robotic lawn mower can operate on slopes, in rain and have sensors to bypass obstacles in the lawn. It also incorporate several safety features such as Lift Sensor which stops rotating the blades once the robot is lifted. More importantly, it can cut the grass into fine powder such that they can be recycled as fertilizer into the soil (grasscycling/mulching). This is not only environmentally friendly but it will also save us from the hassle of removing the clippings.
With such wonderful features, I wonder when such robotic lawn mowers will be ubiquitous in Singapore. The only problem I can predict now is that such robotic lawn mowers are too good to resist taking home by a passer-by. Currently, there is a TheftGuard system installed in the devices that require a personal 4-digit code to be entered upon each use. In my opinion, this might not deter determined thefts. However, there are solutions to this problem such as installing tracking or alarm devices that are activated once the Robomower is brought out of the boundary. Hence, I do not see any reason why they are not used in public parks or at least in country clubs in Singapore.
U036367L Khoo Wei Chuan
http://www.msnbc.msn.com/id/12497049/
Eldery and disabled patients who suffer from movement difficulties have long been subjected to many inconveniences be it at home or outdoors. Despite the invention of wheelchairs and their automated counterparts being able to resolve this problem partially, it can be seen that it has introduced many new problems too. Most significantly, wheelchairs occupy a large amount of base area which in turn requires equally large movement paths. In the context of middle and low incomed Singaporeans whose houses are usually small and compact, this introduces a significant amount of movement difficulty especially through corridors. In addition, as wheelchairs function through the use of two wheeled movement, it is typically incapable of performing acute turns and more importantly, movement through staircases is also impossible.
The robotic legged movement aid developed by Professor Atsuo Takanishi is targeted at resolving these conventional problems faced by wheelchairs. With this replacement movement concept, Takanishi hopes to create a two-legged robot that can fully operate in a human environment, specifically being able to climb staircases and travel along rough surfaces like any normal Homo sapiens do.
The concept in general is very well though of. However, in my opinion, there is one major implication that the developing team has to resolve, which is the overall height increment of the user. As seen from the attached image and linked article, the robotics legs are longer than the length of the user's knee to foot. Despite the user being in a sitting position, it is evident that he is still overall taller than the people around him. Without doubt, increased height will introduce movement difficulties in areas with lower ceilings but more importantly, we need to look at the psychological impact on the user owing to this increased height. By itself, being tall will not induce any negative feelings. However, since the users of this robotic legs are generally elderly and disabled patients, it must be understood that the height increment will more or less serve as a publicity of their movement difficulties. Hence, this may adversely affect the commercial potential of the product. Nevertheless, I do believe that the developers are aware of this issue but probably due to the necessity of using extendable 'limbs' in replace of joints for stable movement through staircases, such a limitation has continued to exist.
As my fyp is on Tai Chi and quantitizing of its properties, I just had to dig up on Tai Chi robots to find out how advanced they are in this area. In this particular robot I found, the main objectives of its creator is to create motions more complicated then just walking actions. Thus, Tai Chi was chosen for its continuity of movements.
The idea was quite straightforward. The robot consists of 22 motors and motion editor was used to manually input the positions of the various motors to achieve the movement of a single form.
The Front, Right, and Top views for the robot's front, right, and above positions, respectively are shown in the motion editor.
These forms were obtained through thorough studying of Tai Chi magazines. The motion editor will output the control data for each motor. By connecting all the forms together, a continuous motion is formed. A significant part of the process is spent testing the robot and making changes to enable the robot to be able to balance when doing the forms.
A second part to the robot includes having a speech recognisation system to identify key words. This would enable users to call out Tai Chi motions which the robot will then perform.
This robot can then be used for entertainment and education purposes has it will help beginners to be able to commit the motions to mind through frequent playing with the robot.
However, the robot is not tuned to any 'Tai Chi' properties such as such as to be able to 'yield and overcome' instead of using brute force that many of us would have seen from martial arts flick and read about. This limits the usefulness of the robots in other areas.
http://www.idemployee.id.tue.nl/g.w.m.rauterberg/conferences/ICAT2004/SS2-1.pdf
Personal or domestic service robots are rapidly infiltrating the homes (statistically forecasted to increase from 1.3M in 2003 to 6.7 by the end of this year, according to the survey by the UN's Economic Commission for Europe (UNECE)) to help handle daily chores like vacuuming the carpets, mowing the lawns, and especially the increasing research for robots to act more human-like (The Age. October 29, 2004). Definitely an exciting, industry to look into; very much the same way that the computer business did 30 years ago.
Whilst helping my mom out in the kitchen, I thought to myself the numerous things which can be automatized: the smart refrigerator; storage cabinets; doing of laundry; cleaning of the floor; cooking, even. Every aspect could be computerized and be handled by robots; but at a price of tagging every single object with an RFID such that robots can identify the article (as mentioned in earlier post "Replacing the Maid", April 10 2006) While WalMart is able to command this from its suppliers, many other smaller retailers would not be able to -- and this would incur and additional cost on us, the end consumers. With that said, it is to note that many of the current inventions are task-specific, which is not any good for that matter.
On a macro scale, what is needed are large real-time sensor networks which challenges the traditional models of computation. A sensor network comprises many individually insignificant and unreliable entities yet exhibit a collective, predicable behavior a la an ant colony. (Judy Tolliver (2006). On inventing laws of nature, faking intelligence, and understanding time. UIUC.) Just as what we have learnt in the lecture whereby individual robots behave in a cooperative manner towards a common goal or interest. "In a sense, we get to play god", researcher Abdelzaher says, "because you cannot change the instinct of an ant, but you can reprogram a particle [to the behavior of choice out of the collective]". We get to dictate the rules that lead to the phenomena in we specify -- a general, mulitpurpose, robotic maid. Just like Rosie the Robot Maid in The Jetsons (in picture above).
Brain surgery is certainly no easy feat, involving intricate and delicate procedures which require a high degree of expertise. However, a robot capable of neurosurgery has been developed and tested. The $30 million project, dubbed neuroArm, incorporates space-age technology from NASA to ensure operating accuracy to within thousandths of a millimetre.
Pioneered by Dr. Garnette Sutherland of the University of Calgary in Canada, the robot substitutes for the hands of a neurosurgeon. A special workstation enables the neurosurgeon to manipulate the robotic arms remotely with controllers that provide tactile feedback and reduce tremors or accidental movement. Meanwhile both man and machine are guided with real-time images, either taken from a surgical microscope or 3D magnetic resonance imaging.
This technology is expected to open up entirely new possibilities in the field. Besides the obvious improvements in precision and reliability, neurosurgeons can now perform image-guided practice simulations beforehand, a feature which can also be used for training. Furthermore, the operating surgeon is no longer required to be physically present beside the patient since the system can be controlled from a remote workstation.
The neuroArm system has only recently passed the testing phase, and manufacturing is now underway. Within a year or two, we could be seeing this technological marvel in the operating room.
Lol and behold, a truly ingenious revolutionised,multi-functional workstation design from Gravitonus.
This innovative workstation design from Gravitonus allows users to move freely, and it comes with an on-board computer which constantly analyses position of your body and pressure on different parts of your body. With all of these analyses, the system will adapt to the user depending on their phychophysical activitiy and create maximum comfort that will fill in all your desire.
Furthermore, its Matrox TripleHead capability ,that is capable of aligning all the display attachment perfectly in the user's best vision area in any body position, together with a special keyboard that allows user to move the keyboard freely in 3D and fix it in a place where the user want it to be, 5.1 sound system, shadow and glare-free illumination of the working area and dynamic exoskeleton for both hand. All these features help to provide the user with the maximum comfort. More importantly, the system is equipped with ACCS (alternative computer control system ) which can be effectively utilised by hardcore gamers in games like Counterstrike.
Currently, the product has yet to be launched though. Hopefully, it would be out soon in the near future.
Dunno what's wrong with the formatting, it was fine during preview, but after publishing, all the format went haywire :(
For further links, please see [1][Video of Gravitonus Workstation]
 Cye, produced by Probotics, is currently the only home robot that can reliably navigate around a home or office. In fact, it navigates better than most research robots which cost upwards of $15,000.
Most robots use range finding and other sensors to move around and avoid obstacles, but these robots never know where they are exactly. On the contrary, Cye uses highly accurate positional sensors to generate a map of home/office, with minimum human help. He can track his movement on a map using a radio link to PC. (A sample map is shown.) Due to this, Cye always knows his exact location and can roam around precisely just like a human.
Cye, produced by Probotics, is currently the only home robot that can reliably navigate around a home or office. In fact, it navigates better than most research robots which cost upwards of $15,000.
Most robots use range finding and other sensors to move around and avoid obstacles, but these robots never know where they are exactly. On the contrary, Cye uses highly accurate positional sensors to generate a map of home/office, with minimum human help. He can track his movement on a map using a radio link to PC. (A sample map is shown.) Due to this, Cye always knows his exact location and can roam around precisely just like a human.
 In order to get Cye installed and running, the first thing is to find an open corner as its base. Attach the radio modem to PC’s serial port, and then install a program called “MapNZap”. After a brief initialization sequence, choose the robot’s orientation relative to the screen, and the direction of the nearest wall relative to Cye. After making the selections, Cye will back off his base, move to the closest wall and bump squarely against it. Then he turns and come back near the base/charger. Now Cye is ready to start exploring.
After roaming around the rooms/office, Cye is instructed to come back to the homebase. The robot rolls through the door from other rooms and right up to the charger. It will be slightly off and miss the charging station. Not perfect, but close enough for a robot. However, Cye will back away, move to the other wall and square against it, then come back and complete a PERFECT dock. Apparently, bumping the wall the charger is on zeroes out accumulated errors on one axis, and bumping the other wall (remember that the base must be placed in a corner) zeroes out errors along the other axis. If Cye can get anywhere near his base, he will dock with his charger every time.
Cye’s navigation success attributes to “Dead Reckoning”, the ability to navigate using positional data only. When it moves to another room, the computer calculates a viable path on the map and sends coordinates for Cye to follow. As Cye moves, his encoder sensors check velocity/distance of each wheel 500 times per second. The telemetry data is sent back to computer so that the robot position can be tracked relative to walls and other obstacles. Probotics claims about Cye’s dead reckoning capabilities, less than 5 degrees of orientation error after 50 feet of travel.
Cye is the best and most affordable home robot on the market.
An amazing navigator: It is the only robot that can reliably find and dock with a charger. Cye uses the corner near its homebase to zero out errors that have accumulated during its journey.
Affordable: It is less than half the cost of its closest competition. Although at a price of US$695, Cye is still much cheaper than other robots, which are priced lowest at US$2000.
In order to get Cye installed and running, the first thing is to find an open corner as its base. Attach the radio modem to PC’s serial port, and then install a program called “MapNZap”. After a brief initialization sequence, choose the robot’s orientation relative to the screen, and the direction of the nearest wall relative to Cye. After making the selections, Cye will back off his base, move to the closest wall and bump squarely against it. Then he turns and come back near the base/charger. Now Cye is ready to start exploring.
After roaming around the rooms/office, Cye is instructed to come back to the homebase. The robot rolls through the door from other rooms and right up to the charger. It will be slightly off and miss the charging station. Not perfect, but close enough for a robot. However, Cye will back away, move to the other wall and square against it, then come back and complete a PERFECT dock. Apparently, bumping the wall the charger is on zeroes out accumulated errors on one axis, and bumping the other wall (remember that the base must be placed in a corner) zeroes out errors along the other axis. If Cye can get anywhere near his base, he will dock with his charger every time.
Cye’s navigation success attributes to “Dead Reckoning”, the ability to navigate using positional data only. When it moves to another room, the computer calculates a viable path on the map and sends coordinates for Cye to follow. As Cye moves, his encoder sensors check velocity/distance of each wheel 500 times per second. The telemetry data is sent back to computer so that the robot position can be tracked relative to walls and other obstacles. Probotics claims about Cye’s dead reckoning capabilities, less than 5 degrees of orientation error after 50 feet of travel.
Cye is the best and most affordable home robot on the market.
An amazing navigator: It is the only robot that can reliably find and dock with a charger. Cye uses the corner near its homebase to zero out errors that have accumulated during its journey.
Affordable: It is less than half the cost of its closest competition. Although at a price of US$695, Cye is still much cheaper than other robots, which are priced lowest at US$2000.

 Can Vacuum the House: Cye can reliably vacuum every room in a house at any time of the day or night. Cye's new Hoover cordless vacuum cleaner will keep the carpets clean even if you aren't at home. It charges when the robot does, so it will vacuum completely unattended!
Cye is Programmable: It can be programmed in Visual Basic or C++. With a few changes in the powerful but user friendly “MapNZap” software, the robot can go from room to room, play tunes, haul dishes and vacuuming.
Can add extra sensors and motors: Cye’s external port will be able to accept a microcontroller known as Handy Board. This will allow more sensors, motors and LEDs to be attached.
Cye is Educational: Playing with Cye will help people learn about the exciting world of robots and robotics. Both kids and adults will learn about navigation, dead reckoning, programming and many more.
http://www.personalrobots.com/home.html
http://www.pioneernet.net/johnc/cyemain.htm
Xu Xiao U036505H
Can Vacuum the House: Cye can reliably vacuum every room in a house at any time of the day or night. Cye's new Hoover cordless vacuum cleaner will keep the carpets clean even if you aren't at home. It charges when the robot does, so it will vacuum completely unattended!
Cye is Programmable: It can be programmed in Visual Basic or C++. With a few changes in the powerful but user friendly “MapNZap” software, the robot can go from room to room, play tunes, haul dishes and vacuuming.
Can add extra sensors and motors: Cye’s external port will be able to accept a microcontroller known as Handy Board. This will allow more sensors, motors and LEDs to be attached.
Cye is Educational: Playing with Cye will help people learn about the exciting world of robots and robotics. Both kids and adults will learn about navigation, dead reckoning, programming and many more.
http://www.personalrobots.com/home.html
http://www.pioneernet.net/johnc/cyemain.htm
Xu Xiao U036505H

























 iRobiq can wake you up every morning and deliver up-to-the minute news, weather, sports, and stock market information. As an entertainment machine, it allows you to take and watch photos, videos or even sing karaoke with it. Kids will love iRobiq as it can tell preloaded stories or even dance to nursery rhymes. Coupled with a camera and wifi capabilities, the surveillance mode allows live photos to be sent via email whenever it detects human presence. Thus, fret not if you feel uncomfortable about leaving your kids or elderly at home while outside the house. iRobiq can also control other robots to perform cleaning tasks and recharges itself. iRobiq is to become an integral part of the family. Here is a
iRobiq can wake you up every morning and deliver up-to-the minute news, weather, sports, and stock market information. As an entertainment machine, it allows you to take and watch photos, videos or even sing karaoke with it. Kids will love iRobiq as it can tell preloaded stories or even dance to nursery rhymes. Coupled with a camera and wifi capabilities, the surveillance mode allows live photos to be sent via email whenever it detects human presence. Thus, fret not if you feel uncomfortable about leaving your kids or elderly at home while outside the house. iRobiq can also control other robots to perform cleaning tasks and recharges itself. iRobiq is to become an integral part of the family. Here is a 







{kind=link}