
eng10822 Loh Khai Choon
The Assistive Robot service Manipulator (or ARM), which is also known as “Manus”, is a 6+2 Degree of Freedoms robot. It main role is to assist disabled people with a severe handicap at their upper limbs. By using input devices such as a keypad (4x4 buttons), joystick or another device that is attached to a non-disabled body part, the manipulator can be controlled to grasps objects with its gripper, and compensates the user for their lost arm and hand functions.
It can be mounted onto a wheelchair, or a mobile base so as to aid in the carrying out in daily activities, be it at home, office or even outdoors. In addition, the ARM can be conveniently folded in beside the wheelchair when it is not being used. World wide user studies have shown the immense benefits of the ARM for its users. They become more self- supportive and increase their participation in society. Therefore the quality of life increases significantly. In addition, costs on professional nursing assistance can be removed as this allows the users to function much more independently during any time of the day.
There are many uses of the ARM in daily life, which includes having and preparing meals, operating household appliances and many others. It can even do housekeeping chores such as doing the dishes and watering plants. Therefore, the activities which can be carried out using the ARM are almost limitless.
Components of the ARM
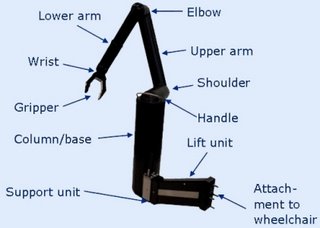
The ARM consists of a gripper with hinged grips to ensure firm grasp of the objects, and is the most versatile part of the ARM. Its maximum spread is 9 cm, and has a damping force of 2 kg. The three hinged fingertips are covered with anti-slip material to ensure that it can grab almost any object without slipping. The clamping force can be controlled by the user, and in case of emergencies, can be manually opened without any damage done.
Next, would be a LED matrix display which will provide the status of the ARM to the user. It consists of a 5x7 LED matrix and a buzzer, and the screen informs the user about the operation mode the ARM is currently operating in. In case of emergencies or errors, the buzzer beeps to warn the user.
In addition, there are several input devices available input devices. It will be selected based on the capabilities of the user. They include a joystick, a keypad with 16 buttons, switches/buttons (such as head-switches, foot switches) or a single switch. In addition, corresponding software will be supplied, and additional input devices are currently under development.

There are two modes of control, either “Carthesian” and “joint” mode, both allowing intuitive and effective manipulation of objects.
Integration with wheelchair
If the ARM is to be mounted on the wheel chair, it can be mounted to either side of the wheelchair, and depends on the users’ preference and the available space on the side. THE ARM has been successfully integrated to many models of the wheelchairs, which include the following:
Invacare: Storm XL and Storm3
Scandinavian mobility: Moover 302, Moover 895
Ortopedia: Elro 90 compact
Garant: 24S
Meyra: Optimus and Sprint and Genius and 3.422
Huka: Max, Skwirrel
Wheelbase: Belize and its elongated version
Safety
In addition, the ARM incorporates several features, which include slip-couplings to limit the maximum exerting force of the ARM in case of collisions, limiting motor current, continuous monitoring of the velocity, positions and acceleration of the ARM, and many other safety features.
Transparent mode
In addition, the ARM can be remote controlled using a PC via the transparent mode. It can be used autonomously or remotely in case of hazardous situations. For such situations, it can be mounted on autonomous platforms and accessed via the PC. Using this transparent mode, it can move much faster, and it can also move in two or more axis simultaneously.
References:
http://www.exactdynamics.nl/english/index.html
 eng10822 Loh Khai Choon
The Assistive Robot service Manipulator (or ARM), which is also known as “Manus”, is a 6+2 Degree of Freedoms robot. It main role is to assist disabled people with a severe handicap at their upper limbs. By using input devices such as a keypad (4x4 buttons), joystick or another device that is attached to a non-disabled body part, the manipulator can be controlled to grasps objects with its gripper, and compensates the user for their lost arm and hand functions.
It can be mounted onto a wheelchair, or a mobile base so as to aid in the carrying out in daily activities, be it at home, office or even outdoors. In addition, the ARM can be conveniently folded in beside the wheelchair when it is not being used. World wide user studies have shown the immense benefits of the ARM for its users. They become more self- supportive and increase their participation in society. Therefore the quality of life increases significantly. In addition, costs on professional nursing assistance can be removed as this allows the users to function much more independently during any time of the day.
There are many uses of the ARM in daily life, which includes having and preparing meals, operating household appliances and many others. It can even do housekeeping chores such as doing the dishes and watering plants. Therefore, the activities which can be carried out using the ARM are almost limitless.
Components of the ARM
eng10822 Loh Khai Choon
The Assistive Robot service Manipulator (or ARM), which is also known as “Manus”, is a 6+2 Degree of Freedoms robot. It main role is to assist disabled people with a severe handicap at their upper limbs. By using input devices such as a keypad (4x4 buttons), joystick or another device that is attached to a non-disabled body part, the manipulator can be controlled to grasps objects with its gripper, and compensates the user for their lost arm and hand functions.
It can be mounted onto a wheelchair, or a mobile base so as to aid in the carrying out in daily activities, be it at home, office or even outdoors. In addition, the ARM can be conveniently folded in beside the wheelchair when it is not being used. World wide user studies have shown the immense benefits of the ARM for its users. They become more self- supportive and increase their participation in society. Therefore the quality of life increases significantly. In addition, costs on professional nursing assistance can be removed as this allows the users to function much more independently during any time of the day.
There are many uses of the ARM in daily life, which includes having and preparing meals, operating household appliances and many others. It can even do housekeeping chores such as doing the dishes and watering plants. Therefore, the activities which can be carried out using the ARM are almost limitless.
Components of the ARM
 The ARM consists of a gripper with hinged grips to ensure firm grasp of the objects, and is the most versatile part of the ARM. Its maximum spread is 9 cm, and has a damping force of 2 kg. The three hinged fingertips are covered with anti-slip material to ensure that it can grab almost any object without slipping. The clamping force can be controlled by the user, and in case of emergencies, can be manually opened without any damage done.
Next, would be a LED matrix display which will provide the status of the ARM to the user. It consists of a 5x7 LED matrix and a buzzer, and the screen informs the user about the operation mode the ARM is currently operating in. In case of emergencies or errors, the buzzer beeps to warn the user.
In addition, there are several input devices available input devices. It will be selected based on the capabilities of the user. They include a joystick, a keypad with 16 buttons, switches/buttons (such as head-switches, foot switches) or a single switch. In addition, corresponding software will be supplied, and additional input devices are currently under development.
The ARM consists of a gripper with hinged grips to ensure firm grasp of the objects, and is the most versatile part of the ARM. Its maximum spread is 9 cm, and has a damping force of 2 kg. The three hinged fingertips are covered with anti-slip material to ensure that it can grab almost any object without slipping. The clamping force can be controlled by the user, and in case of emergencies, can be manually opened without any damage done.
Next, would be a LED matrix display which will provide the status of the ARM to the user. It consists of a 5x7 LED matrix and a buzzer, and the screen informs the user about the operation mode the ARM is currently operating in. In case of emergencies or errors, the buzzer beeps to warn the user.
In addition, there are several input devices available input devices. It will be selected based on the capabilities of the user. They include a joystick, a keypad with 16 buttons, switches/buttons (such as head-switches, foot switches) or a single switch. In addition, corresponding software will be supplied, and additional input devices are currently under development.
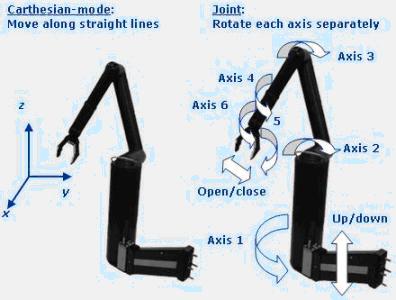 There are two modes of control, either “Carthesian” and “joint” mode, both allowing intuitive and effective manipulation of objects.
Integration with wheelchair
If the ARM is to be mounted on the wheel chair, it can be mounted to either side of the wheelchair, and depends on the users’ preference and the available space on the side. THE ARM has been successfully integrated to many models of the wheelchairs, which include the following:
Invacare: Storm XL and Storm3
Scandinavian mobility: Moover 302, Moover 895
Ortopedia: Elro 90 compact
Garant: 24S
Meyra: Optimus and Sprint and Genius and 3.422
Huka: Max, Skwirrel
Wheelbase: Belize and its elongated version
Safety
In addition, the ARM incorporates several features, which include slip-couplings to limit the maximum exerting force of the ARM in case of collisions, limiting motor current, continuous monitoring of the velocity, positions and acceleration of the ARM, and many other safety features.
Transparent mode
In addition, the ARM can be remote controlled using a PC via the transparent mode. It can be used autonomously or remotely in case of hazardous situations. For such situations, it can be mounted on autonomous platforms and accessed via the PC. Using this transparent mode, it can move much faster, and it can also move in two or more axis simultaneously.
References:
http://www.exactdynamics.nl/english/index.html
There are two modes of control, either “Carthesian” and “joint” mode, both allowing intuitive and effective manipulation of objects.
Integration with wheelchair
If the ARM is to be mounted on the wheel chair, it can be mounted to either side of the wheelchair, and depends on the users’ preference and the available space on the side. THE ARM has been successfully integrated to many models of the wheelchairs, which include the following:
Invacare: Storm XL and Storm3
Scandinavian mobility: Moover 302, Moover 895
Ortopedia: Elro 90 compact
Garant: 24S
Meyra: Optimus and Sprint and Genius and 3.422
Huka: Max, Skwirrel
Wheelbase: Belize and its elongated version
Safety
In addition, the ARM incorporates several features, which include slip-couplings to limit the maximum exerting force of the ARM in case of collisions, limiting motor current, continuous monitoring of the velocity, positions and acceleration of the ARM, and many other safety features.
Transparent mode
In addition, the ARM can be remote controlled using a PC via the transparent mode. It can be used autonomously or remotely in case of hazardous situations. For such situations, it can be mounted on autonomous platforms and accessed via the PC. Using this transparent mode, it can move much faster, and it can also move in two or more axis simultaneously.
References:
http://www.exactdynamics.nl/english/index.html
2 comments:
u0205268 chenhuaxing
I am just wondering whether the ARM could be called as a robot.
it is more like a mechanical device.
u0204951 Xu Lixia
Somehow i feel that this robot manipulator though may help patients wiht their daily chores of grapping things etc but i was wondering if it would cause the patient to become too dependednt on the machine?If there comes a chance wherer the robot malfunction,then the patient would not be able to grap objects etc?
I would recommend this manululator to act as asupplement but at the same time,patients aso have to be trained to grap things using their own hands.In this way,the robot would only help to speed up the actions of the patients while the patients can also learn to be independent at the same time.
Post a Comment