U0204593 Chiam Lee Chuan
“AN ARMY of 1000 millimetre-scale robots capable of exploration and inspection work in hazardous environments is to be built under a €4.4 million European project.
The I-SWARM (Intelligent Small World Autonomous Robots for Micro-manipulation) project, which is coordinated by Jörg Seyfried of the University of Karlsruhe in Germany, will involve 10 European universities.
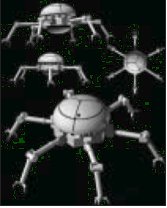
The bots will probably consist of a microchip with six or eight legs. They will get power from solar cells and communicate with their comrades via infrared or radio links. This should allow them to be sent into small or dangerous spaces to inspect equipment for signs of damage. A team of entomologists from the University of Graz in Austria will provide advice on ways to mimic insect communication.
The researchers hope to have prototypes capable of pushing small objects around by mid-2006.”
Quoted: NewScientist.com news service, 24 September 2005

The above mentioned project is actually a research field in which Biomimetics can be applied in the area of explorations. Biomimetics, though is a relatively new word, is a term used for those engineering systems that make use of traits observed in biology especially the behavioral patterns of insects. In recent years, scientists are studying how insects walk, fly and navigate their ways around obstacles to develop super, tiny robots that could led in the advances of biomimetics robotics. Perhaps some of us are not alien to the biomimetics term as the concepts have already been featured in science fiction works, from the ever-complaining Marvin in Hitchhiker’s Guide to the Galaxy to the murderous nanomachines in Michael Crichton’s Prey. Scientific researches are now focusing its attention on gathering answers to how insect can function in such exquisite ways. How does a fly manouever with such precision, a bee find its way from flower to hive or a cockroach move so quickly? At the same time, the swarming behaviour of ants, bees, termites and other social insects has implications far beyond the hive. Modeling the swarm behaviour provides researchers with new conceptual frameworks for extending the field of artificial intelligence and suggests new possibilities for computer hardware and software design.
Why mimic insects and its swarming behaviour for exploration purposes? Using insects to model our robots held several advantages over the current convectional built-for-exploration robots. One of the greatest strength of insect robots is its locomotion and miniature size. Using cockroach as an example, it is shaped in such a way that both speed and stability can be achieved during movement over uneven surfaces. The secret lies in the self-stablising posture, achieved through a low centre of mass located toward the rear of the animal and by a wide base support and a thrusting leg function in which the legs acts mainly as thruster rather than striders, launching the insect forward. In flight, we marvel at the extraordinary maneuver ability of the bee.

An engineer once calculated, infamous, that an aeroplane with proportionally the same weight and wing size would never get off the ground. To defy the steady-state principles of aeronautics, the bee uses a combination of three aerodynamics techniques to fly and to perform their astounding aerobatics. In exploration, one of the utmost important areas is navigation. In nature, one of the best navigators around is the bee. From the detail studies of the Australian scientists, we now know that the bee uses the sun as a compass for flight direction. At the same time, it stores the information of the places it has been to and recalls this on their return flight by making connections between the landmarks and the hives.
Another important strategy we can adapt from insects behaviour is the goal-achieving method of a purely-bottom up approach with no central command and control structure. A swarm of termites for example exhibits a collective intelligence that far exceeds the intelligence of any individual termites. There is no big “boss” in charge and no individual insect grasps the big picture. Yet, it can accomplish a collective goal that best serve the interest of the community. For exploration, such decentralized system might be more suitable that a centralized one in terms of robustness and flexibility. The loss of a multi-billions exploration project would be minimum if the communication link of an agent in a multi-agents system is lost as compared to the single centralized agent system.
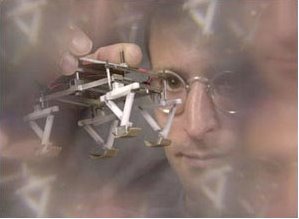
Already, there are researching groups planning and implementing robotics insect for explorations. Notably, the NASA is exploring the idea of having 10,000 electronic-mechanical bugs with four to six legs of the size of a large beetle on a distant planet. Each tiny bug will be fitted with sensors and cameras to relay information back to earth. Piezoelectric ceramic technology is used for efficient power generation. Currently, each prototype cost $100 but a mass-produced bug should only cost as little as $10. While there are still plenty of issues to be ironed out, the depth and scope of planet exploration is more promising than the convectional strategies.
In another gound-breaking project, Dr. K.M. Isaac, professor of aerospace engineering at UMR, is working with NASA, The Ohio Aerospace Institute (OAI) and Georgia Institute of Technology to create a robotic flying machine called an Entomopter. The mechanical insect, capable of crawling as well as flying, will be able to study, videotape, photograph, and gather other types of information about planets, specifically Mars, closer than any current technology, “Scientists hope to send these robotic bugs to Mars by the end of the decade”, he adds. This technology is not only applicable to space exploration, but also to disaster-struck areas like unclear accident. In deep-sea exploration, NASA's Institute for Advanced Concepts (NIAC), are coming up with this new idea of robo-swimmers which models after a seahorse. In this case, seahorse is chosen as it can swim against ocean currents and use their tails to grab on to something and remain stationary.
While we have seen many of these ideas in fiction books and movies, the potential of exploration-designed mechanical bugs fitted with sensors and cameras is certainly very real. Who knows someday we will might be looking at Mars from the eyes of a bug.
Reference: http://www.spacedaily.com/news/mars-robot-02b.html
http://www.cis.plym.ac.uk/cis/InsectRobotics/Applications.htm
http://www.science.org.au/nova/084/084key.htm
 U0204593 Chiam Lee Chuan
“AN ARMY of 1000 millimetre-scale robots capable of exploration and inspection work in hazardous environments is to be built under a €4.4 million European project.
The I-SWARM (Intelligent Small World Autonomous Robots for Micro-manipulation) project, which is coordinated by Jörg Seyfried of the University of Karlsruhe in Germany, will involve 10 European universities.
The bots will probably consist of a microchip with six or eight legs. They will get power from solar cells and communicate with their comrades via infrared or radio links. This should allow them to be sent into small or dangerous spaces to inspect equipment for signs of damage. A team of entomologists from the University of Graz in Austria will provide advice on ways to mimic insect communication.
The researchers hope to have prototypes capable of pushing small objects around by mid-2006.”
Quoted: NewScientist.com news service, 24 September 2005
U0204593 Chiam Lee Chuan
“AN ARMY of 1000 millimetre-scale robots capable of exploration and inspection work in hazardous environments is to be built under a €4.4 million European project.
The I-SWARM (Intelligent Small World Autonomous Robots for Micro-manipulation) project, which is coordinated by Jörg Seyfried of the University of Karlsruhe in Germany, will involve 10 European universities.
The bots will probably consist of a microchip with six or eight legs. They will get power from solar cells and communicate with their comrades via infrared or radio links. This should allow them to be sent into small or dangerous spaces to inspect equipment for signs of damage. A team of entomologists from the University of Graz in Austria will provide advice on ways to mimic insect communication.
The researchers hope to have prototypes capable of pushing small objects around by mid-2006.”
Quoted: NewScientist.com news service, 24 September 2005
 The above mentioned project is actually a research field in which Biomimetics can be applied in the area of explorations. Biomimetics, though is a relatively new word, is a term used for those engineering systems that make use of traits observed in biology especially the behavioral patterns of insects. In recent years, scientists are studying how insects walk, fly and navigate their ways around obstacles to develop super, tiny robots that could led in the advances of biomimetics robotics. Perhaps some of us are not alien to the biomimetics term as the concepts have already been featured in science fiction works, from the ever-complaining Marvin in Hitchhiker’s Guide to the Galaxy to the murderous nanomachines in Michael Crichton’s Prey. Scientific researches are now focusing its attention on gathering answers to how insect can function in such exquisite ways. How does a fly manouever with such precision, a bee find its way from flower to hive or a cockroach move so quickly? At the same time, the swarming behaviour of ants, bees, termites and other social insects has implications far beyond the hive. Modeling the swarm behaviour provides researchers with new conceptual frameworks for extending the field of artificial intelligence and suggests new possibilities for computer hardware and software design.
Why mimic insects and its swarming behaviour for exploration purposes? Using insects to model our robots held several advantages over the current convectional built-for-exploration robots. One of the greatest strength of insect robots is its locomotion and miniature size. Using cockroach as an example, it is shaped in such a way that both speed and stability can be achieved during movement over uneven surfaces. The secret lies in the self-stablising posture, achieved through a low centre of mass located toward the rear of the animal and by a wide base support and a thrusting leg function in which the legs acts mainly as thruster rather than striders, launching the insect forward. In flight, we marvel at the extraordinary maneuver ability of the bee.
The above mentioned project is actually a research field in which Biomimetics can be applied in the area of explorations. Biomimetics, though is a relatively new word, is a term used for those engineering systems that make use of traits observed in biology especially the behavioral patterns of insects. In recent years, scientists are studying how insects walk, fly and navigate their ways around obstacles to develop super, tiny robots that could led in the advances of biomimetics robotics. Perhaps some of us are not alien to the biomimetics term as the concepts have already been featured in science fiction works, from the ever-complaining Marvin in Hitchhiker’s Guide to the Galaxy to the murderous nanomachines in Michael Crichton’s Prey. Scientific researches are now focusing its attention on gathering answers to how insect can function in such exquisite ways. How does a fly manouever with such precision, a bee find its way from flower to hive or a cockroach move so quickly? At the same time, the swarming behaviour of ants, bees, termites and other social insects has implications far beyond the hive. Modeling the swarm behaviour provides researchers with new conceptual frameworks for extending the field of artificial intelligence and suggests new possibilities for computer hardware and software design.
Why mimic insects and its swarming behaviour for exploration purposes? Using insects to model our robots held several advantages over the current convectional built-for-exploration robots. One of the greatest strength of insect robots is its locomotion and miniature size. Using cockroach as an example, it is shaped in such a way that both speed and stability can be achieved during movement over uneven surfaces. The secret lies in the self-stablising posture, achieved through a low centre of mass located toward the rear of the animal and by a wide base support and a thrusting leg function in which the legs acts mainly as thruster rather than striders, launching the insect forward. In flight, we marvel at the extraordinary maneuver ability of the bee. An engineer once calculated, infamous, that an aeroplane with proportionally the same weight and wing size would never get off the ground. To defy the steady-state principles of aeronautics, the bee uses a combination of three aerodynamics techniques to fly and to perform their astounding aerobatics. In exploration, one of the utmost important areas is navigation. In nature, one of the best navigators around is the bee. From the detail studies of the Australian scientists, we now know that the bee uses the sun as a compass for flight direction. At the same time, it stores the information of the places it has been to and recalls this on their return flight by making connections between the landmarks and the hives.
Another important strategy we can adapt from insects behaviour is the goal-achieving method of a purely-bottom up approach with no central command and control structure. A swarm of termites for example exhibits a collective intelligence that far exceeds the intelligence of any individual termites. There is no big “boss” in charge and no individual insect grasps the big picture. Yet, it can accomplish a collective goal that best serve the interest of the community. For exploration, such decentralized system might be more suitable that a centralized one in terms of robustness and flexibility. The loss of a multi-billions exploration project would be minimum if the communication link of an agent in a multi-agents system is lost as compared to the single centralized agent system.
An engineer once calculated, infamous, that an aeroplane with proportionally the same weight and wing size would never get off the ground. To defy the steady-state principles of aeronautics, the bee uses a combination of three aerodynamics techniques to fly and to perform their astounding aerobatics. In exploration, one of the utmost important areas is navigation. In nature, one of the best navigators around is the bee. From the detail studies of the Australian scientists, we now know that the bee uses the sun as a compass for flight direction. At the same time, it stores the information of the places it has been to and recalls this on their return flight by making connections between the landmarks and the hives.
Another important strategy we can adapt from insects behaviour is the goal-achieving method of a purely-bottom up approach with no central command and control structure. A swarm of termites for example exhibits a collective intelligence that far exceeds the intelligence of any individual termites. There is no big “boss” in charge and no individual insect grasps the big picture. Yet, it can accomplish a collective goal that best serve the interest of the community. For exploration, such decentralized system might be more suitable that a centralized one in terms of robustness and flexibility. The loss of a multi-billions exploration project would be minimum if the communication link of an agent in a multi-agents system is lost as compared to the single centralized agent system.
 Already, there are researching groups planning and implementing robotics insect for explorations. Notably, the NASA is exploring the idea of having 10,000 electronic-mechanical bugs with four to six legs of the size of a large beetle on a distant planet. Each tiny bug will be fitted with sensors and cameras to relay information back to earth. Piezoelectric ceramic technology is used for efficient power generation. Currently, each prototype cost $100 but a mass-produced bug should only cost as little as $10. While there are still plenty of issues to be ironed out, the depth and scope of planet exploration is more promising than the convectional strategies.
In another gound-breaking project, Dr. K.M. Isaac, professor of aerospace engineering at UMR, is working with NASA, The Ohio Aerospace Institute (OAI) and Georgia Institute of Technology to create a robotic flying machine called an Entomopter. The mechanical insect, capable of crawling as well as flying, will be able to study, videotape, photograph, and gather other types of information about planets, specifically Mars, closer than any current technology, “Scientists hope to send these robotic bugs to Mars by the end of the decade”, he adds. This technology is not only applicable to space exploration, but also to disaster-struck areas like unclear accident. In deep-sea exploration, NASA's Institute for Advanced Concepts (NIAC), are coming up with this new idea of robo-swimmers which models after a seahorse. In this case, seahorse is chosen as it can swim against ocean currents and use their tails to grab on to something and remain stationary.
While we have seen many of these ideas in fiction books and movies, the potential of exploration-designed mechanical bugs fitted with sensors and cameras is certainly very real. Who knows someday we will might be looking at Mars from the eyes of a bug.
Reference: http://www.spacedaily.com/news/mars-robot-02b.html
http://www.cis.plym.ac.uk/cis/InsectRobotics/Applications.htm
http://www.science.org.au/nova/084/084key.htm
Already, there are researching groups planning and implementing robotics insect for explorations. Notably, the NASA is exploring the idea of having 10,000 electronic-mechanical bugs with four to six legs of the size of a large beetle on a distant planet. Each tiny bug will be fitted with sensors and cameras to relay information back to earth. Piezoelectric ceramic technology is used for efficient power generation. Currently, each prototype cost $100 but a mass-produced bug should only cost as little as $10. While there are still plenty of issues to be ironed out, the depth and scope of planet exploration is more promising than the convectional strategies.
In another gound-breaking project, Dr. K.M. Isaac, professor of aerospace engineering at UMR, is working with NASA, The Ohio Aerospace Institute (OAI) and Georgia Institute of Technology to create a robotic flying machine called an Entomopter. The mechanical insect, capable of crawling as well as flying, will be able to study, videotape, photograph, and gather other types of information about planets, specifically Mars, closer than any current technology, “Scientists hope to send these robotic bugs to Mars by the end of the decade”, he adds. This technology is not only applicable to space exploration, but also to disaster-struck areas like unclear accident. In deep-sea exploration, NASA's Institute for Advanced Concepts (NIAC), are coming up with this new idea of robo-swimmers which models after a seahorse. In this case, seahorse is chosen as it can swim against ocean currents and use their tails to grab on to something and remain stationary.
While we have seen many of these ideas in fiction books and movies, the potential of exploration-designed mechanical bugs fitted with sensors and cameras is certainly very real. Who knows someday we will might be looking at Mars from the eyes of a bug.
Reference: http://www.spacedaily.com/news/mars-robot-02b.html
http://www.cis.plym.ac.uk/cis/InsectRobotics/Applications.htm
http://www.science.org.au/nova/084/084key.htm
6 comments:
U0307999
ZHAI NING
that is something that i can expect from hollywood movie. What i want to talk about here is that how we can coordinate those small scale robotics.
In lecture, we learn that it is relativly difficult to let so many robotics coordinate each other. but after listen to the industry talk, we found out that is it that some times we are too stingy to expect all the 'desired functions' from robotics?
It may upset some professors, but is it possible that we can come up with some 'simple' coordinated robotics? without very complex tasks, functions, or traits? It may only need to go into the mine and find if it is ok to explore further, or just do some simple exhausted search may be not the most efficient or powerful, but the idea here is some simple or primary method maybe serve better, and serve early for the human being's present difficultes.
Hope it is not whay i think, but i hope it can help ourselves to rethink the way we deal with the issue of robotics.
U0307717 Chew Jian Qiang
Well, personally I think that having lots of small robots to do exploration is a good idea, but in places with harsh conditions, that would be a big problem.
If you do not know yet, Mars have much much harsher climate conditions than Earth. Can something that small be able to resist such conditions? A gust of wind might blow the little critters to god-knows-where. Well, it might be a good thing if the god-knows-where is the other side of the Mars where it cannot be reached the the insectbots walked. Exploring more ground with the aid of the climate. However, if the god-knows-where is somewhere at the bottom of a cliff, chances are the insects would have had their components everywhere.
As we enter the nano-age, I think we are capable of making such army of explorers. Even flying ones. This would bring good news to those to rescue teams throughout the world. The little critters could be sent out to find survivors of a disaster.
However, with the inventions of these insectbots, I think that invasion of privacy cases will increase. Bugs crawling up a bathroom wall may seem harmless, until you realize its a micro camera-mounted 'robug'. *SCREAMS* Not even Baygon will be able to keep them away.
Having said that, I do believe that someday, insectbots will be of very good use to mankind, provided they do not evolve themselves. (Anyone who has read Michael Crichton's 'PREY' will know.)
U0205383
NEETI WARRIER
The blog entry made pretty interesting reading. Though the first line, that is the reference to "1000 millimeter-scale robots" was rather misleading as the robots were being compared to insects. Or does it mean 'of the order' of millimeters?
Like Chew Jian Qiang has mentioned, the robustness of these micro-bots in extreme conditions (for example, strong undercurrents and unpredictable situations such as the appearance of an inquisitive sea creature) is rather doubtful. Even for exploration on Mars, wouldnt it be more practical to have bigger sized robots rather than miniature ones considering the undulating terrain and deep crevices a robot may encounter? For instance, a robot of the size of a bug could easily fall into a narrow yet deep crevice never to resurface again whereas a bigger bot has a greater chance of survival.
Why then is there a need to miniaturize the robots used for such a purpose? Unless its assumed that the robots intended for space exploration are to leverage on their ability to fly or, the capacity limitations of the vehicle transporting them...
However, I disagree with Zhai Ning. I do think smooth, effective coordination between the robots is feasible in the long run. Remember the video shown in the lecture on the "Ballroom dancing" act of the robots? Before seeing the video, I could hardly envisage such a smooth act by robots! Now i'd say the avenues for development are limitless...
Another concern is the proposed availability of robo-bugs at as low a price as 10$!! In a world where one's privacy is hardly guaranteed anymore, such an innovation at such a low price, would only exacerbate the situation. To ensure such devices are not misused would be cumbersome unless distribution itself is restricted.
U0204511 Tan Chin Hiong
This is indeed a very basic yet effective idea. In fact, this is how insects have survived all this while. As mentioned above, the communication and the sharing of information will be a major consideration. I would also like to point out another consideration which is power management. How are these small robots going to power themselves? Motor drive, logic circuits, processors, sensors, communications, etc. There needs to be a renewable power source such as solar power to continously power these little robots for extended campaign missions.
My 2 cents.
U0308353 Chua Xiaoping Shona
The idea of using small scale robot to do exploration can be interesting. But I think that the size of robots used for exploration has to be with respect to the area for exploring.
If the area is large, it maybe useful in using bigger robots. If the area is small, using of smaller robots will be good.
regarding the comment posted by Chua Xiaoping Shona:
I think in many cases this is wrong. I do not know what you are thinking of by mentioning "large area" and "small area", but for the exploration of a mountained area with a size of 10square-kilometers it could be more efficient to use 100 tiny camera-equipped bee-like Biomimetics than for example 1 big drone which gives you only a picture from above, whereas the Biomimitics can swarm and take a better look at certain places of higher interest. And even robots which can move on the ground could have many problems if it is for example a wooded area.
Post a Comment