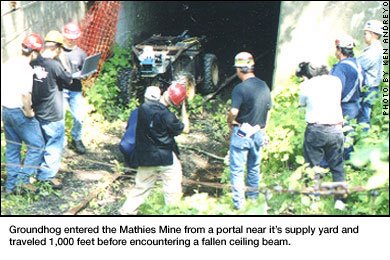
Groundhog is a mine-mapping robot developed by Carnegie Mellon University (CMU) in response to a mining accident due to inaccurate maps. Its objective was to explore and map a large abandoned coal mine accurately and reliably, so as to ensure safety of the miners.
 Groundhog is equipped with:
-tiltable SICK laser range finders to obtain scans efficiently
Groundhog is equipped with:
-tiltable SICK laser range finders to obtain scans efficiently
-cameras, tilt, gas and sinkage sensors to obtain data
-a gyroscope to allow it to get through the obstacles and the different terrains within the mine
-a wireless video system for data obtained to be seen by the team outside the mine
Groundhog makes use of the perception technology - Simultaneous Localization and Mapping (SLAM), to derive maps from the data obtained in real time. With autonomous and mapping technology, Groundhog has to make decisions by itself on how and where to go, and to return outside with the required information.
The hallmark of Groundhog and its incorporated technology came when it encountered a fallen beam, and made the right decision to retreat. Under development, this was an unforeseen situation. Yet through Groundhog’s own analysis, it decided the beam was unsafe to cross, and appropriately retreated.
I think this is an excellent example of how autonomous robotics can be incorporated into real-world situations. With further development, robots like Groundhog can help ensure safety of workers in mining and in other areas such as deep sea excavation.
References:
http://www.cmu.edu/cmnews/extra/2002/021031_groundhog.html http://www.ais.fraunhofer.de/ARC/3D/download/icra2004/node3.html http://www.ri.cmu.edu/projects/project_509.html http://www.cmu.edu/cmnews/030625/030625_minemap.html
10 comments:
Hmm..looks good from what I have seen, except that the robot is slightly too large for navigating through narrow spaces and uneven grounds.
Just a query, how far can the robot travel and still maintain contact with the people outside the mine?
U045926H Wong Jia Hui
Yup that's true. There were constraints to Groundhog's movements. From the documentation of Groundhog at http://www.ri.cmu.edu/pubs/pub_5317.html, the dimensions of Groundhog is 1m (ht) x 1.2m (width), which is unsuitable for narrow spaces, like you pointed out.
I don't know exactly how far the robot can travel, but from the link above, the range of 1.5km is within the operational range of Groundhog. And contact is maintained through messages from Groundhog to the control team over an 802.11 wireless link, to show that it was working.
yu zhenyu u037786a
this is similar to the robot in the deep sea. humans use them in exploring and searching. this is main use for robots nowadays.
i am sure,robots have more functions such as playmate for child, worker in the factory, fighter in the war, etc.
First Law
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
Second Law
A robot must obey the orders given by human beings, except when such orders would conflict with the First Law.
Third Law
A robot must protect its own existence, as long as such protection does not conflict with the First or Second Law.
From the human's perspective, it's great to see such developments and technology which will lessen the risk on the human existence. Sadly, by the 3 Laws, the robots can't really protect their own existence if they had to undergo dangerous tasks. It's a wild imagination, but maybe one day robots might become so integrated with the human race that the 3rd Law might be abolished or modified to protect their existence..
Alvin Ong
U036077M
u036147x
adrian yang u0304837@nus.edu.sg
hmmm...just 1 small query about this robot..:
After the Groundhog detects the trapped miners, is it able to perform some form of life prolonging actions (such as the removal of the debris that are endangering the person, or providing the casaulties with immediate first aid)? In other words, does the robot do anything else besides locating the people?
U036418N Tan Chee Boon
I believe this robot can also be used during accidents where building collapse or even during earthquakes to find survivors under fallen buildings. However, the size is a factor to be considered.
Koh Yew Tong U036316U
Groundhog seems to be very useful in mine mapping. But what if it happens to trigger the mine? Dos the robot able to withstand the impact of a mine?
Interesting to say the least.
A few things on my mind: How does wireless video work when the robot is deep in the mine, and will not the electrical component adversely affect the mine, such as sparking up and blowing up an entire coal mine or something.
Still, the robot looks a little too bulky. I wonder if they can come up with something with legs. That'll be cooler =)
cool robot although it should be more practical and have more lidars
cool name!! realy creative idea to titled it "groundhog". ;) I liked it
Post a Comment