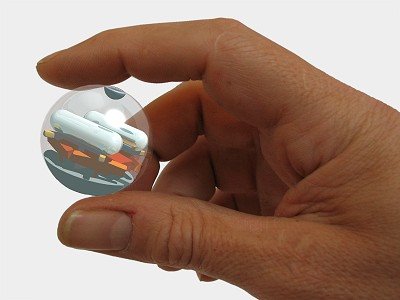
 Exploring planets like Mars with robots are expensive and time consuming. The success of a mission is linked to the survival of a single robot. Therefore the idea of a swarm of small cost-effective robots are appealing. Since the loss of a few units won't necessarily lead to the failure of a mission. Dr. Penlope and Dr. Steve Dubowsky have proposed a design of multiple jumping robots the size of tennis balls. All equipped with a camera and communication systems. Orientating themselves and other units to perform a intelligent collective autonomous behaviour. Each unit carrying a few instruments adding to the swarms ensemble. So that the swarm will have the ability of adapting to and investigating the environment.
Exploring planets like Mars with robots are expensive and time consuming. The success of a mission is linked to the survival of a single robot. Therefore the idea of a swarm of small cost-effective robots are appealing. Since the loss of a few units won't necessarily lead to the failure of a mission. Dr. Penlope and Dr. Steve Dubowsky have proposed a design of multiple jumping robots the size of tennis balls. All equipped with a camera and communication systems. Orientating themselves and other units to perform a intelligent collective autonomous behaviour. Each unit carrying a few instruments adding to the swarms ensemble. So that the swarm will have the ability of adapting to and investigating the environment.In December 2005 NIAC the NASA Institute for Advanced Concepts awarded the idea with the Phase II grant. So that the inventors could develop the design and testing it on earth.
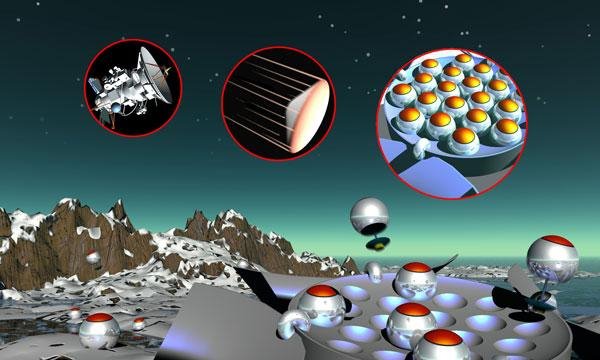
 The jumping motion will be ensured by letting the robots be weighted in one side so that they always will come to rest in a specific orientation. They will also be able to control their direction and perhaps even able to perform a rolling motion.
The jumping motion will be ensured by letting the robots be weighted in one side so that they always will come to rest in a specific orientation. They will also be able to control their direction and perhaps even able to perform a rolling motion.A example of the benefit of the swarm idea is the ability to adapt to terrain. As an example the units could be used exploring caves on Mars with a great chance of extracting themselves out of the caves when they have investigated it. To enter the caves and still remain i contact with the earth the units could be used as relay points allowing a network to stretch into the cave.
 Filip Wistrand
Filip WistrandNT061734A
Reference:
New Scientist Space
Universe Today
Astrobiology Magazine
9 comments:
Stefan Wester, NT061492M
This shows an excellent way in which redundancy can be used as an asset. Here to use of extra robots is not a thing that is a must to make sure that the project doesn't but here it is used so that the robots can cover extra ground, or creating a relay for signals or any other of several uses.
But I have to say I'm a bit skeptical about the propulsion method. The idea of making a round ball stay still on the side of a hill, is nothing that I have had a big success with but with the lower gravity of mars or the moon it might be easier. And if there is life on mars wonder what they would say seeing a huge amount of jumping balls landing and start hopping around...
Leaw Tiew Liang, U036391E
Sometimes, investing all your resources onto 1 robot may not be such a bad thing as long as the robot is robust.
Having multiple robots have lots of problems as well. For example, other then their core functionalities, everyone one of them have to be able to communicate. If it's communication device spoils, its functionalities will be useless as well.
Also, one of the small robots definitely will be the main processor unit, and if that one spoils, its equivalent to the entire system faulting. Therefore I guess it's more about coming up with more robust systems that would not break down easily rather than splitting up tasks.
Hi..
I think what NASA is trying to do by using these multiple robots is adopt a "Divide and Conquer" appraoch..something similar to the RoboSoccer environment..where it is an entire team's effort to hit goals and win the match. As clearly stated in the article, having multiple robots aids in bringing about a togetherness...probably emulating the idea from the animal kingdom..like a swarm of bees or a pack of lions.
I guess we'll have to wait and see how the robots function together as a unit and then judge the performance of such systems.
-Gayathri Shankaranarayanan
U036611E
Filip Wistrand NT061734A
Some notes about the coments and my blog.
Peraps i didn't explain it clearly enugh. but the Main advanteges that NASA hopes to achive with the multiple robot system is that: you dont put everything into one single robot making the system volnurble, Adaptation (the posibilitys to exlore caves) , the automusity and the posibility of having meny diverse units, the posibility of entering areas where one single robot would lose contact with earth.
Why Leaw tiew Liang must there be one single robot that acts as a main processor. The big point of this robotic system is that there will be many diffrent types of robots that will work together. Why can't Nasa send sevral robots that has the ability to comunicate with earth? So that if one breaks down the comunication link won't be lost. That is the whole point of not havin one single robot.
I totaly agree with you stefan. I also think that it might be stupid making the robots simple. Perhaps it would be good if the robot could transport itself by other means aswell.
And ofcourse this is only a pilot projekt to test if it is possible to create successful multipple systems like this. A misson to mars using this kind of system will not be launched within 10 years.
If such a rmission would be launched I think that the Ensamble of robots will consist of sevral diffrent robots. meny smaller like those discribed hear but also sevral bigger robots. suitet for otherthings. Perhaps transporting the smaller, computate, analyse and controling the swarm.
This is really an interesting article. It is a totally new way of dealing with exploration problem. However I was wondering how these tiny bots are able to collect rock samples as that would require power drilling equipment. Even if they did I am really interested in knowing how they will find their way back to the main capsule after exploration. We will also have to deal with possible problem that all might end up in the same area exploring,like a ravine, unable to come out.They will be very useful I agree but I see them more as a supplement to main rover .
Pavan U045965E
Woo. if the propulsion system really works, then it would overcome lots of obstacles, including being able to jump out of craters and overcoming steps. It could do well as a security robot on earth as well.
The main thing about a swarm of robots is that each individual robot is cheap. very cheap.
Also, even if you lose a few, you still can acomplish the mission as well.
One important point would be how effective the individual robots cooperate as a whole and act as a team. That's an important area of research.
Chen ZhaoLin
U036701H
Hopping microbots. Now that is the new way to travel. Just thought of something funny. Won't the jump distance be very much further under the low gravity of the moon? Would be ironic if one of them got lost because it jumped too far.
Another problem would be if the robots got stuck in awkward scenarios or in tight spots where they cannot jump out of. Or perhaps it could land in such a way that it is "upside down" and cannot jump anymore.
It could also end up rolling off steep slopes and getting damaged or fall into canyons where there is no reception. Because of its size it becomes easier for it to fall into crevaces.
It is hard to predict what holes and slopes exists in unexplored terrain and it seems that a round tennis ball like robot will have problems in getting unstuck.
Chen Song Yi
u036339w
Hi, this is a revolutionary idea in space exploration. Saves costs and ensures a higher mission success probability. Just as taught in lecture. Their small size ensures that they are mobile as well.
Based on your description, it seems that the swarm of robots are meant for reconnaisance purpose, as they are fitted with camera, etc. Don't think that it will be suitable for deeper research like the analysis of soil content. This missions will still require the space rovers. Thanks. :)
Rgds,
Ng Chin Ling (U047690E)
A network of cooperative robots is definitely a platform for robust explorations and emergent behaviours that can evolve to counter scenarios not previously considered.
NASA has been exploring this idea for awhile now: http://www.kk.org/outofcontrol/ch3-b.html
However, the "swarm" idea cannot be taken too far with robotics. Swarm systems work extremely well in nature, but robotics are different.
In nature, movement/action takes little energy, but thought/planning does use a lot of energy for its complexity.
In robotics, movement/action is expensive, but thought/planning with the modern processing power is extremely cheap.
They are different, and a system should be designed with a view to minimize the energy required to accomplish the same objective.
Eugene Peng
NT061399W
Post a Comment