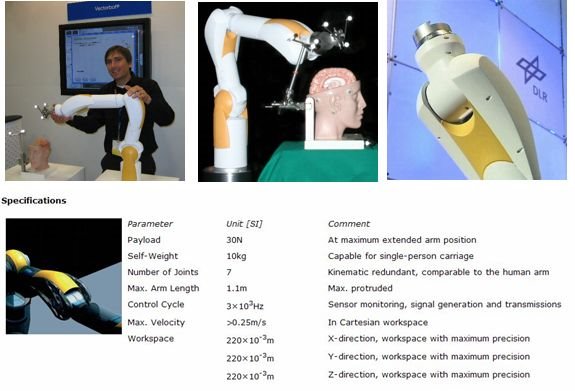
The new KineMedic® is DLR light weight robotic arm specially designed to perform dexterous hand actions in surgical interventions. This robot arm developed by German Aerospace has a much better payload-to-weight-ratio compared to robots today. It has 7 torque controlled redundant degree of freedom, giving it more flexibility and less collisions. It is compact and lightweight, that it to be mounted easily, yet stiff enough to perform high-precision operation. The joints are equipped with position and torque sensors for high-sensitive and precise movement using impedance-control.
This robotic system consists of 2 major components, the Arm and control module which includes external supply module. The 2 modules are connected by DC power cables and fiber optics for almost instant communications. The 7 joints of the robotic arm are arranged to a shoulder, an elbow and a wrist, each with intersecting axes. In order for high precision control, high performance communication bus is used to interact between the joints and its control circuits situated at the eternal supply.
The external control module is made up of DC power supply, emergency stop box and a personal computer for control. The controller used for control is a FPGA chip which is then connected to the computer via optical fiber wires. Calculations for the robotic control are done on the personal computer and not on the dedicated hardware.
From Rongjie (u0406232)
8 comments:
Jaseema Banu U036882L
This robot will be very useful for surgeons who perform surgeries that require them to make minute incisions and involve precise movements. this type of surgeries are known as minimally invasive surgerical procedures and have a myriad of benefits such as less pain and scarring, speedier recovery and reduction in the incidence of post-surgical complications, such as adhesions. but i wonder whether this robotic systems are controlled by surgeons or operate in an autonomous mode?
It is advantageous that the size of the arm is compact and does not seem to occupy much space in the normally crowded operating theatre.
From the link, i gathered that the robot senses the movements of the surgeons automatically to avoid collisons. The 7 joints of the arm enables very precise control of the positions.
U036855H Ong Mei Yee
The human hand is highly nimble and complex and it is rather difficult to create a robotic hand to do carry out something as sophisticated as a surgery.Thus, the invention of this robot is a feat. I believe much more improvements can be made to improve the flexibility of the robot's hand movements.
Tan Sze Sze Vivian U037841J
It would be great if the device runs on batteries. This will make it more portable. Instead of having it stationed in the operating theatre, why not have it in a mobile vehicle, since it is also lightweight? There are at times when operations are required immediately. We can't possibly fly the patient to the nearest hospital. Time is a factor. So why not operate on the spot? We can leverage on the portability of this device to perform such operations.
Cheong Wen Li, Ronald U036405J
To Jas:
Not too sure abt controlling it from a remote position, but maybe it's more for precision processes that need highly stable hands, i wun want a mistake cut in my brain!!
To Mei Yee:
ya it can avoid the surgeons, it is like what the lecturer says, it is highly mobile and able to have multi trajectory.
To Vivian:
Ya of coz, God created Hands!!
but then dun totally remove the benefits of robotic arms. there are still some precise surgery that might still be gd if you use robotic arms.. haha
To Ronald:
haha i wun want it to operate on batteries thou, what if halfway thru operation no power, then leave my brain open how?? anyway it's a gd suggestion!! hahaah... lolz..
I guess the idea of portability is good. But as of now, the portable power supply is still at its limit, and requires break through before it can support more sophisticated operations.
Meanwhile, I suggest that these arms robots be capable of being used in vehicles like ambulance etc. Doing it in the open is not a good idea, the exposure to dirt and pollution are extensive. In addition, the car can provide a relative good supply of 12V power.
I believe that the main disadvantage of the system is that the surgeon has to train and be farmilar with the system and how much strength and pressure to use in controlling the arm. However the good point is that it will reduce or eliminate the trembling of a surgeon's hands which provides for more safety. Other improvements could include programming boundaries which the robot cannot move past making the surgery even safer.
Feng Junwei Benjamin
U046064E
@Jaseema Banu
The robot was designed for a variety of different control modes and surgical procedures, in order to make it a standard component in the OR.
In semi-autonomous mode, you move the robot simply by pushing it in the direction you want. The limits where the robot can be moved to are controled by software. With this, the robot can guide you to the planned spot. Its just like you and the robot move together the instrument.
Of course a fully autonomous mode is possible too.
In remote control mode, the robot(s) are connected to a master station with haptic feedback interfaces. This mode is used for surgical procedures in minimal invasive surgery.
Post a Comment