
A hand-wrist assisting robotic device (HWARD) designed by researchers from University of California helps stroke patients by improving their ability to grasp and release objects. Studies have shown that repetitive training on movements helps in the rehabilitation of the affected arm and hand. Hence, HWARD was developed to provide aid to the patient by having a pattern of ‘wrist extension with hand grasping’ and ‘wrist flexion with hand release’ when handling objects. The design follows the neurobiological principles of motor learning – sensorimotor integration, environmental complexity, attention and movement repetition [1].
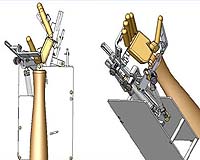
As shown from the figures, HWARD enables rotation of the thumb, fingers and wrist. Also, a lever design is used to enable joint movement. This makes use of air cylinders attached to the level and the air pressure can be adjusted to aid movements.
HWARD is activated by 3 air cylinders and the air pressure is regulated so that the air cylinders produce approximately 4 to 25N of force. This is done with precision regulators which control the source air pressure levels entering the system. In addition, sensors are attached to the joints and cylinders to provide significant data for computation. For instance, rotary potentiometers measure the finger, wrist and thumb joint angles, micro pressure sensors on air cylinders measures pressure levels. A computer program then allows the experimenter to control specific functions, perform safety shutdowns and collect information about the joint angles and pressure.
The patient has to initiate the motor command. In cases where the hand can only move minimally, the robot can be controlled to complete the task so that the brain will re-learn what it is like to make the full grasp or release. With HWARD, stoke patients can regain their normal hand function to cope with daily chores.
[2] http://www.redorbit.com/news/technology/833236/robotic_therapy_restores_hand_use/index.html [3] http://www.spacedaily.com/reports/Robotic_Arm_Aids_Stroke_Victims_999.html
12 comments:
Perhaps we are not too far off from the age of where robotic limbs and parts will start to replace our once functional limbs. In some sense, we could become like androids, a mixture of robotic technology with ourselves. But let's not get too far ahead of ourselves.
This invention is very useful from a medical perspective, as rehabilitation is a time consuming task. By being able to control this process and making it convenient for patients, it is a huge step in helping patients to recover quickly.
Seah Qiong Feng Sean
U036739M
My first thoughts when i saw this posting was the robotic arm that Wil Smith had in the movie I-Robot shown on TV few weeks ago... I guess it's really a wonderful breakthrough for those who are disabled. I'm not too sure but i believe the costs of such devices are still relatively high and hopefully with more R & D, eventually it will be available more readily for the needy. (Just a qn, are the degrees of freedom greatly limited because of the way it is structured?)
Alvin Ong
U036077M
Technology using in medical always helps the patients a lot. The machine always has more patience than a doctor so that it will gives more advantage in recovering procedure.
It may also have its flip side. Different people have different needs. If the machine give the save strength to all the people, some people may benefit less. How can it help the patients more? Through machine learning or some setting?
Liu Ming
U048695H
(To Alvin)
HWARD enables the patient to still rotate the thumbs and wrist, but does not allow him to spread/move his fingers sideway.
The purpose of HWARD is to allow the patient to keep repeating the grasping and releasing motion.
Perhaps a further development would be possible for controlling the individual fingers.
Ong Mei Yee
U036855H
u036147x
adrian yang u0304837@nus.edu.sg
I personally agree that this is one area in which robotic systems can aid mankind. Personally, i feel that the use of robots to aid in the rehabilitation of a defect in one part of the body certainly carries with it more benefits than costs. Furthermore, such benefits are even more prominent when robotic features are used to replace a loss limb since such they can perhaps supply the patients with greater strength than they had previously; thus enhancing their physical capabilities compared to before.
I too think that this invention is very good for rehabilitation and can be extended to legs as well. This is to prevent atrophying of tissues and muscles in the various body parts after stroke. Because rehabilitation seriously require tremendous determination and patience. If the patient is to give up half-way, at least the robotic therapy can helps to force the hand muscle to work and hopefully to gain recovery some day. But I believe the medical bills will also be very expensive too.
Yeo Kelly
U036786J
U036418N Tan Chee Boon
A very useful robot. Robots in medical sector is by far the most useful ones i have seen. This robot therapy is definitely not the first and not the last we will see.
Cool... Very useful for people who are recovering from hand injuries and leg injuries (mentioned by Kelly) too. I would like to extend from what Liu Ming mentioned about different strengths applied to different people. Does the robot know the required strength to be applied to different patients? Applying the same strength to people with different degrees of injury may aggravate their condition. So I was wondering if there is a database of the patients' conditions from which the robot can refer to before exerting the required strength on the patient's limb(s).
Cheong Wen Li, Ronald U036405J
(To Ronald)
The forces applied by the robotic hand ranges from 4 to 25N and can be manually controlled by the operator.
The profiles of the patients are not available but the operator can specify the strength need to be applied for each individual.
Ong Mei Yee (u036855H)
(To Ronald)
The forces applied by the robotic hand ranges from 4 to 25N and can be manually controlled by the operator.
The profiles of the patients are not available but the operator can specify the strength need to be applied for each individual.
Ong Mei Yee (u036855H)
This is a fanatastic invention and use of robotics. Aside from therapy, another possibility is that it could be programmed to enable someone to improve on his/her handwriting by using the robot regularly to train the hand.
U036378U Boo Junyou
For these device I believe what are more complicated is not the hardware we see but the programming and artificail intelligence behind. There must be a lot of learning and self-adjustment for the robotic system.
Wu Zhenyu
U036584N
Post a Comment