S0500130 Andreas Lars Johan Roupe
Since many years ago humans have been very interested in space and to explore and get out in the space.
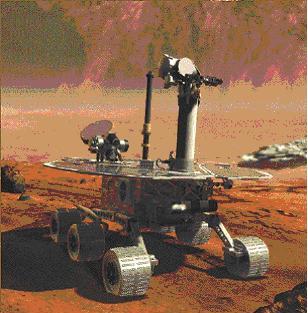
For the last decades we have been very interested in other planets i.e. the “red planet” Mars. Right now there are i.e. robot rovers on Mars, Spirit and Opportunity ( Mars Exploration Rovers). They were launched in June and July 2003 and they landed on Mars in January 2004. In the beginning it was supposed to be there three month and then stop, but is has take over two years now and they are still searching for signs of life on Mars. Why is Mars so interesting? Mars is the planet which is most Earth-like planet. It may once have had/still have liquid water and thus life and it may be possible to colonize. NASA’s Mars Exploration Strategy is to “Follow the water”, “Water is key because almost everywhere we find water on earth, we find life.”
The challenges for these robot rovers are (1) that the communication time delay is around 20 min which means that if you change something on a computer on earth, it will take 20 minutes before the robot gets the information, (2) there are in extreme temperature, (3) rough and rocky terrain, (4) dust and (5) no global positioning system (GPS).
How do these robot rovers work and how are they controlled??
Having more physical capability than 1997's Sojourner rover, Spirit and Opportunity also needed more autonomy. Engineers improved the auto-navigational driving software to give the golf cart-sized explorers more freedom. To navigating themselves, the rovers get a command telling them where to end up, and then evaluate the terrain with stereo imaging to choose the best way to get there. They must avoid any obstacles they identify. This capability result in longer daily drives than would be possible by simple depending on step-by-step navigation commands from earth.
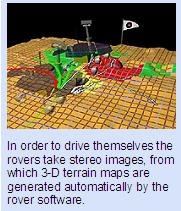
The auto-navigation system takes pictures of the nearby terrain using one of the Mars Exploration Rover stereo camera pairs. After stereo images are taken, 3-D terrain maps are generated automatically by the rover software. The way is determined from the height and density of rocks or steps, excessive tilts and roughness of the terrain. Dozens of possible paths are considered before the rover chooses the shortest, safest path toward the programmed geographical goal. The rover then drives between 0.5 and 2 meters closer to its goal, depending on how many obstacles are nearby. The whole process repeats until it either reaches its goal, or is commanded to stop. The average obstacle-avoidance driving speed for Spirit and Opportunity is nearly 34 meters per hour
[1]. To get power to do this movement they use solar cells.
Another improvement in software that has been made is Visual Odometry
[2]. When the rover drives over sandy and rocky terrain, they can make slips. But the Visual Odometry gives the rovers a much better notion of how far it has actually travelled. It works by comparing pictures taken before and after a short drive.
NASA is working to give rovers more autonomy so that missions can conduct more science with fewer people. Meanwhile, opinions vary about the degree of autonomy that is needed for future missions, or if any is even appropriate onboard planetary rovers and spacecraft. Most agree, though, that higher intelligence is imperative, for deeper space exploration and for more productive planetary missions.
[3]
So the question is, how far can we go???
 S0500130 Andreas Lars Johan Roupe
Since many years ago humans have been very interested in space and to explore and get out in the space.
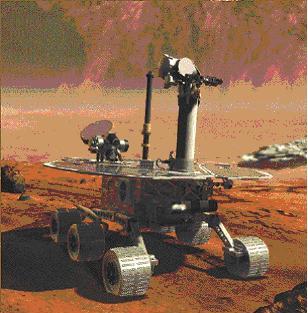
For the last decades we have been very interested in other planets i.e. the “red planet” Mars. Right now there are i.e. robot rovers on Mars, Spirit and Opportunity ( Mars Exploration Rovers). They were launched in June and July 2003 and they landed on Mars in January 2004. In the beginning it was supposed to be there three month and then stop, but is has take over two years now and they are still searching for signs of life on Mars. Why is Mars so interesting? Mars is the planet which is most Earth-like planet. It may once have had/still have liquid water and thus life and it may be possible to colonize. NASA’s Mars Exploration Strategy is to “Follow the water”, “Water is key because almost everywhere we find water on earth, we find life.”
The challenges for these robot rovers are (1) that the communication time delay is around 20 min which means that if you change something on a computer on earth, it will take 20 minutes before the robot gets the information, (2) there are in extreme temperature, (3) rough and rocky terrain, (4) dust and (5) no global positioning system (GPS).
How do these robot rovers work and how are they controlled??
Having more physical capability than 1997's Sojourner rover, Spirit and Opportunity also needed more autonomy. Engineers improved the auto-navigational driving software to give the golf cart-sized explorers more freedom. To navigating themselves, the rovers get a command telling them where to end up, and then evaluate the terrain with stereo imaging to choose the best way to get there. They must avoid any obstacles they identify. This capability result in longer daily drives than would be possible by simple depending on step-by-step navigation commands from earth.
S0500130 Andreas Lars Johan Roupe
Since many years ago humans have been very interested in space and to explore and get out in the space.
For the last decades we have been very interested in other planets i.e. the “red planet” Mars. Right now there are i.e. robot rovers on Mars, Spirit and Opportunity ( Mars Exploration Rovers). They were launched in June and July 2003 and they landed on Mars in January 2004. In the beginning it was supposed to be there three month and then stop, but is has take over two years now and they are still searching for signs of life on Mars. Why is Mars so interesting? Mars is the planet which is most Earth-like planet. It may once have had/still have liquid water and thus life and it may be possible to colonize. NASA’s Mars Exploration Strategy is to “Follow the water”, “Water is key because almost everywhere we find water on earth, we find life.”
The challenges for these robot rovers are (1) that the communication time delay is around 20 min which means that if you change something on a computer on earth, it will take 20 minutes before the robot gets the information, (2) there are in extreme temperature, (3) rough and rocky terrain, (4) dust and (5) no global positioning system (GPS).
How do these robot rovers work and how are they controlled??
Having more physical capability than 1997's Sojourner rover, Spirit and Opportunity also needed more autonomy. Engineers improved the auto-navigational driving software to give the golf cart-sized explorers more freedom. To navigating themselves, the rovers get a command telling them where to end up, and then evaluate the terrain with stereo imaging to choose the best way to get there. They must avoid any obstacles they identify. This capability result in longer daily drives than would be possible by simple depending on step-by-step navigation commands from earth.
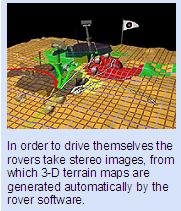 The auto-navigation system takes pictures of the nearby terrain using one of the Mars Exploration Rover stereo camera pairs. After stereo images are taken, 3-D terrain maps are generated automatically by the rover software. The way is determined from the height and density of rocks or steps, excessive tilts and roughness of the terrain. Dozens of possible paths are considered before the rover chooses the shortest, safest path toward the programmed geographical goal. The rover then drives between 0.5 and 2 meters closer to its goal, depending on how many obstacles are nearby. The whole process repeats until it either reaches its goal, or is commanded to stop. The average obstacle-avoidance driving speed for Spirit and Opportunity is nearly 34 meters per hour [1]. To get power to do this movement they use solar cells.
Another improvement in software that has been made is Visual Odometry [2]. When the rover drives over sandy and rocky terrain, they can make slips. But the Visual Odometry gives the rovers a much better notion of how far it has actually travelled. It works by comparing pictures taken before and after a short drive.
NASA is working to give rovers more autonomy so that missions can conduct more science with fewer people. Meanwhile, opinions vary about the degree of autonomy that is needed for future missions, or if any is even appropriate onboard planetary rovers and spacecraft. Most agree, though, that higher intelligence is imperative, for deeper space exploration and for more productive planetary missions. [3]
So the question is, how far can we go???
The auto-navigation system takes pictures of the nearby terrain using one of the Mars Exploration Rover stereo camera pairs. After stereo images are taken, 3-D terrain maps are generated automatically by the rover software. The way is determined from the height and density of rocks or steps, excessive tilts and roughness of the terrain. Dozens of possible paths are considered before the rover chooses the shortest, safest path toward the programmed geographical goal. The rover then drives between 0.5 and 2 meters closer to its goal, depending on how many obstacles are nearby. The whole process repeats until it either reaches its goal, or is commanded to stop. The average obstacle-avoidance driving speed for Spirit and Opportunity is nearly 34 meters per hour [1]. To get power to do this movement they use solar cells.
Another improvement in software that has been made is Visual Odometry [2]. When the rover drives over sandy and rocky terrain, they can make slips. But the Visual Odometry gives the rovers a much better notion of how far it has actually travelled. It works by comparing pictures taken before and after a short drive.
NASA is working to give rovers more autonomy so that missions can conduct more science with fewer people. Meanwhile, opinions vary about the degree of autonomy that is needed for future missions, or if any is even appropriate onboard planetary rovers and spacecraft. Most agree, though, that higher intelligence is imperative, for deeper space exploration and for more productive planetary missions. [3]
So the question is, how far can we go???
3 comments:
very long post... very hard to read !!! Ban User !
s0500296 - Martin Wiig
Since control signals use so much time in travelling between Earth and other planets such as Mars, a higher degree of intelligence and autonomy seems to quite necessary indeed. Sturdy little helpers like Spirit and Opportunity will pave the way for less sturdy helpers like us into space, and the surprising endurance of these two robots is very encouraging! It is cool to think about two humanmade little guys driving along so far away.
Post a Comment