
Picture showing the Red Planet, Mars just before the sun shines on it
Since their arrival, they have embarked on an originally planned 90 day mission but have since far exceeded that time span and is still operating as we speak. Sending back rich information including pictures, mineral and data reports, these robots are an absolute marvel as they operate in the harsh red landscape of Mars. We shall now take a look at the technology that Sojourner, Spirit and Opportunity are using during their amazing space adventure.
 Picture showing how the solar arrays are layed out on the vehicle
Yet another improvement over Sojourner was that Spirit and Opportunity both carried two 8-amp hour lithium batteries as opposed to Sojourner’s 40-amp hour lithium battery. Apparently both Spirit and Opportunity had a supply of 900 watt hours of energy per day, more than Sojourner. However the major drawback in solar energy is that Sojourner could only operate in regions of intense and high solar regions which meant only the equatorial regions could be explored in Mars. NASA is thinking of alternating between different power sources which could give future robotic probes a way to explore the whole of Mars. The challenge is of course to find different power sources that are small enough, mobile enough and can supply enough energy to these probes.
Telecommunications
Both robotic probes Spirit and Opportunity both talk to earth via two orbiters that are circling Mars, namely Mars Odyssey and Mars Global Surveyor. As the orbiters circle Mars, everyday there is a tight time span of 10 minutes for the two robotic space probes to communicate information via UHF antennas and the amount of information transmitted is roughly 76 megabits for Odyssey and 8 megabits for Global Surveyor. The two orbiters use X-band communications to transfer information back to Earth at a faster rate than that of the two robotic probes transferring information to the orbiters. I am of the opinion that if possible, the robotic space probes could be improved to rely on X-band communications as well to facilitate the information transfer. With a window period of information transfer set at only 10 minutes, this faster communication method could possibly give the two robotic probes a better success rate at transferring information back to earth.
Picture showing how the solar arrays are layed out on the vehicle
Yet another improvement over Sojourner was that Spirit and Opportunity both carried two 8-amp hour lithium batteries as opposed to Sojourner’s 40-amp hour lithium battery. Apparently both Spirit and Opportunity had a supply of 900 watt hours of energy per day, more than Sojourner. However the major drawback in solar energy is that Sojourner could only operate in regions of intense and high solar regions which meant only the equatorial regions could be explored in Mars. NASA is thinking of alternating between different power sources which could give future robotic probes a way to explore the whole of Mars. The challenge is of course to find different power sources that are small enough, mobile enough and can supply enough energy to these probes.
Telecommunications
Both robotic probes Spirit and Opportunity both talk to earth via two orbiters that are circling Mars, namely Mars Odyssey and Mars Global Surveyor. As the orbiters circle Mars, everyday there is a tight time span of 10 minutes for the two robotic space probes to communicate information via UHF antennas and the amount of information transmitted is roughly 76 megabits for Odyssey and 8 megabits for Global Surveyor. The two orbiters use X-band communications to transfer information back to Earth at a faster rate than that of the two robotic probes transferring information to the orbiters. I am of the opinion that if possible, the robotic space probes could be improved to rely on X-band communications as well to facilitate the information transfer. With a window period of information transfer set at only 10 minutes, this faster communication method could possibly give the two robotic probes a better success rate at transferring information back to earth.
The first images of Mars from the camera on Spirit being sent back to earth via the orbiters
Also, as the Deep Space Network on earth that receives data from outer space has to cater to all space exploration projects, this faster and better efficiency could be transferred to less time span required for earth to receive information thus allowing the Deep Space Network antenna to cater to other projects as well. Avionics So what really drives the robots? The answer has got to be its brain or processor which can easily rival that of a high end laptop. An improvement over Sojourner is that Spirit and Odyssey have a memory space of over 1000 times more and have 256 megabytes of flash memory that allows it to retain information even when there is no power. The processor is stored in a Warm Electronics Box which in turn is protected by the Rover Electronic Module.
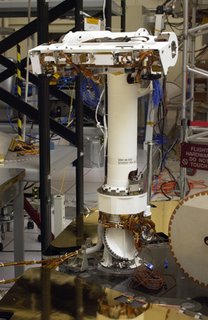
 Picture showing how scientists work on the Warm Electronics Box, the brain of the robots
Picture showing how scientists work on the Warm Electronics Box, the brain of the robots
Some of the features include gold plated walls and insulation features which help keep the Box warm especially at night where Mars temperatures drop to -96 degrees Celsius. The other feature of the robot is that it has an Inertial Measurement Unit that measures the tilt on which the robot probe is on. This allows the robot to check its movements and realign its Centre of Gravity to prevent it from toppling over and giving it more overall stability. Another astounding feature of this high end robot is that it actually conducts its own functionality checks and hence maintains its feasibility in tough conditions where humans could not help service it. Software Engineering The robotic probes of Spirit and Odyssey have huge improvements in software engineering and we shall now examine some of these. One of these include its Autonomous Planetary Mobility which we will examine later. The robotic probes are programmed to actually self navigate and assess the dangers imminent as they move along the surface of Mars. Both Spirit and Odyssey also have 24 cameras of the highest resolution and lightest weight and can send back awesome pictures of Mars.
 Picture showing the "head" and the "neck" of the robot fitted with cameras to take panoramic views
Image returns is also enabled in this system known as the ICER wavelet based image compressor that compresses the images to enable more to be sent back at one go. Range and Reachability maps also allow scientists to gauge exactly where the probe has to go and helps form the landscape of Mars.
Entry Features
Two features which are interesting in helping the probes land are the airbags and rockets. The airbags help reduce the damage of the landing impact and coupled with a parachute, completely aids the landing of the probes on Mars without any damage whatsoever.
Picture showing the "head" and the "neck" of the robot fitted with cameras to take panoramic views
Image returns is also enabled in this system known as the ICER wavelet based image compressor that compresses the images to enable more to be sent back at one go. Range and Reachability maps also allow scientists to gauge exactly where the probe has to go and helps form the landscape of Mars.
Entry Features
Two features which are interesting in helping the probes land are the airbags and rockets. The airbags help reduce the damage of the landing impact and coupled with a parachute, completely aids the landing of the probes on Mars without any damage whatsoever.
 Picture showing the airbags that will cushion the rover's impact with the surface of Mars upon landing
Picture showing the airbags that will cushion the rover's impact with the surface of Mars upon landing
Also rockets were fired by three rocket-assisted descent (RAD) motors to help reduce the speed of the probes landing. When the craft is about 2.4 km from the surface, the Descent Image Motion Estimation Subsystem (DIMES) takes pictures of the surface and analyzes them to predict horizontal speed. This is important as strong winds at the Gusev crater could impede a safe landing objective. To counter the winds, the Traverse Impulse Rocket System (TIRS) also kicks in to stabilize the spacecraft. Autonomous Planetary Mobility The last technology feature is how this system allows the robotic probes to navigate and move around on Mars. It has firstly an Improved Mobility System that helps to counter the extreme centre of gravity problems that used to plague Sojourner. Its system is located at the back of the vehicle with wheels that are larger and has a special spiral flecture pattern that allows shocks to be absorbed by the spoke and the wheel rather than letting it reach the other parts of the rover. Also it has a unique rocker-bogie system that allows the robot to overcome obstacles bigger than its wheel diameter. For an example of how this works, you can see the Heineken advertisement link I put up above in the starting paragraph and notice how the robot maneuvers. Each wheel also has cleats that give the robot better grip over soft sand.
To navigate around Mars, both Spirit and Opportunity had more autonomy than Sojourner. They both have an auto navigational system whereby all scientists had to do was to key in the coordinates of where they want the robot probe to go and the robots will self assess the terrain and devise the best way possible to reach the destination. This system is quite revolutionary and you can view the movie clip of how it works here.
http://marsrover.nasa.gov/gallery/video/movies/mer_rovernav_240.mov
Opportunity has used this system to drive for 230 metres and Spirit 80 metres. What the auto navigational system does is to take many pictures of the surrounding and piece together a 3D landscape image of the terrain and from there the robotic probes assess the obstacles in its region with 16,000 possible points per step. Lastly, as each robot moves, it could perhaps fall short of its expected distance due to soft sand and possibly even slopes which cause the robots to slip backward. However one new feature is the Visual Odometry software system which compares images of surrounding features before and after its motion and determines whether the distance it has moved is the right distance. This is far better than the usual system of calculating the distance traveled by the wheels of the rovers as soft sand slipping could even occur when wheels are locked. Conclusion Both Spirit and Opportunity are still on Mars and even now face challenges as evidenced by latest news reports which talk about how one of Spirit’s wheels have stopped working completely and is now a burden to its other wheels as Spirit has to drag it along. The challenge update presently is that as solar powered robotic vehicles, Spirit has to reach a slope on Mars where it can catch enough sunshine to operate throughout the Martian winter which is descending upon Mars in approximately a hundred days which barely leaves Spirit with enough time to make it there with its faulty wheel causing excess friction. The success of these robotic space probes show that although robots are not astronauts and can’t possibly provide substitutes for them, they help to increase our capabilities into the unknown and efficiently make scientific breakthroughs while we are still within our safety zone. Stay tuned on the webpage links below if you are interested to see if Spirit actually makes it. 1. http://antwrp.gsfc.nasa.gov/apod/ap970707.html 2. http://www.bizjournals.com/washington/stories/1997/07/14/story3.html 3. http://mars.jpl.nasa.gov/
6 comments:
very long post... very hard to read !!! Ban User !
Seems like a research paper... should be removed... too long ! its an entire text book... eewww
well.. on the contrary, i think it shows how seriously the author treats the subject. In all honesty, you should examine the quality of the article rather than dismiss his efforts by deriding the length of the entry.
By the way, next time u contrive to make mean comments like this, it'll be better if you don't hide behind a mask sir..
u0204781 Peh Meng Wee
The use of robots in space exploration is definitely a good choice, especially considering our poor propulsion technology that makes the trips take years even to reach the destination. Imagine the amount of food that need to be stock up for an astronaut to live one year on Mars.
On the article, I wonder why nuclear energy (plenty of it) is not used to complement solar energy to power the robots. In this way, we would not worry about the robots running out of energy. Also, the robots will not die from radiation so we can just go nuclear right?
u0204779 Pang Sze Yong
In answer to Peh Meng Wee's suggestion of nuclear power for remote robotic, a better understanding of nuclear power is needed.
Nuclear power is energy derived from the heat that is associated with the radioactive decay of radioactive material (nuclear fission). This heat is used to boil water into steam to power steam turbines, converting the heat energy into electrical energy.
As such, it would be impossible (at present) to put a nuclear reactor onto a Mars Rover because you would need to put large reactors, large steam turbines and large water reservoirs onto the Rover in order to convert the heat into electricity which is simply not feasible.
Secondly, consider the deployment method of the Rover. It is dropped from space, it literally crashes onto Mars. Would you risk dropping a nuclear reactor onto Mars?
There is also the matter of radioactive contamination of the environment on Mars. Although there are no living things on Mars (we haven't found any as yet) does not mean that we don't have to be careful about what we are leaving behind while we are doing our exploration.
Post a Comment