 I'm a fan of cars. When I was asked to do a blog on robots, the first thing came to my mind was to look for something to do with cars. I started by looking for “robots+car industry”. It is easy for one to imagine how important robots are to the automotive manufacturing. Indeed, from a source of Robotics Online, 90% of the robots working today are in the factories, and more than half of those are in automotive industry. So cars are built by robots. Then I pondered, is it possible for robot to drive cars. I went to do bit of research; to my surprise, lot of people are concerned about robot driven cars, or more scientifically, autonomous vehicles. Obviously, the people have the greatest interest are the military people, to be precise, U.S. Department of Defense (DoD). Irritated by lost of soldiers due to roadside bombs in Iraq for several years, DoD is particularly keen on autonomous vehicles. As a result, Defense Advanced Research Projects Agency (DARPA) was appointed to do the research so that by 2015, hopefully all the military vehicles in U.S. Army are driverless. The agency took a rather unconventional approach: a public competition with a $1 million prize was held in 2004, namely the Grand Challenge. The idea is to get autonomous vehicles from various research institutions and universities to compete against each other on the 132-mile course in the Mojave Desert. During the course of the competition, the vehicles are not allowed to have any communication with the people. The point of the challenge is however not for military use but to energize the engineering community to tackle the problems need to be solved before vehicles can pilot themselves safely at high speed over unfamiliar terrain.
106 teams took the challenge; none has made to the finishing line. Actually, none has gone beyond 7.4 miles, or 5% of the whole course. However, the competition was nothing close to a failure as objective of the competition was achieved, people were excited about the idea of driverless vehicles, and in the following year, 195 teams responded to the DARPA Grand Challenge 2005. This time, the Agency doubled the prize to 2 million. In the end, 5 teams have finished the 131.6-mile course and “Stanley”, a driverless VW Touareg from Stanford University clinched the championship at a elapsed time of 6 hours, 53 minutes and 58 seconds.
Although one needs only to control steering and throttle to get a car go as he wants, from the incidents of the Grand Challenge, it can be see that the task of driving a motor vehicle is not easy at all. The major difficulty that robots face is the way they see the world. The way they see the world is through measuring, using variety of sensors-laser sensor, cameras, radars, to gauge the shape, dimension, texture of the terrain ahead. They then use the data and process the data to get steering and throttle control in a way that to stay on road and avoid obstacles. Here are some of the techniques that used by various teams.
Laser sensing – The most common sensor are the laser sanners. A beam of light is emitted by the vehicle and bounced off by the terrain ahead. By measuring the time taken for the beam to return, the sensor can calculate the distance to objects and build a 3-D model of the terrain in front of the vehicle. The limitation is that each laser sensor can get only a narrow slice of the world. The detector can’t detect colors and may bounce off shiny surface like a body of water and thus gives a flawed 3-D model.
Video Cameras – video cameras are capable of capturing vast images that extend to a great distance. They can measure the texture and color of the ground, helping the robots understand where is safe to drive and alerts them when there is danger. However, it is difficult to judge the actual size and distance of the objects by using just one camera. They are also of little use during night or in bad weather.
Adaptive Vision – The concept is to get the vehicle run as fast as possible if a smooth road is detected for a distance long enough ahead of the vehicle. This is done by laser range finders to locate a smooth patch of ground and samples the color and texture of this patch by scanning the video image. It then matches the image with the road ahead to look for this color and texture to get a smooth road. If the road changes, the robot slows down until it figures out where is safe to drive.
Radar – Radar sends radio waves to a target and measure the return echo. The advantage of it is that they can see really far into the distance and the radio waves can penetrate dust clouds and bad weather. The downside is that radar beams are not as precise as lasers, resulting in objects that are not obstacles appear, confusing the robot.
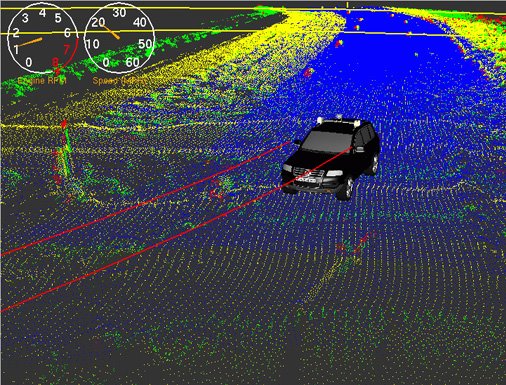
Cost Map – This is the programming technique the robots use to find the road and avoid obstacles. The program compiles data from the sensors and divides the world into area that is safe to drive and area that is not safe. A map image is formed with colored area indicating degree of danger of the terrain ahead.
Path Planning – After the cost map is formed, the path planning program is used to find the best path from point to point. The robot figures out every possible path and compares every path on the cost map to find the best path.
Despite the combination of all the sensors used by various teams, unforeseen circumstances can immobilize the vehicle as the car needs to endure the roughness of the world but the sensors are precise instruments that often misled by external interference. The 3rd Grand Challenge is scheduled for 2007 and the racing will be held in the urban environment where the circumstances will get more complicated.
To be honest, I’m not so excited about having cars that can drive by themselves. I like to drive. I’m not trilled by the idea that deprives me of driving. However, the autonomous vehicles do have certain points. Firstly, it can reduce the road accidents, as the robot doesn’t get drowsy or drunk. It is a big deal as we are talking about saving lives. Moreover, precious time is saved as you can now read your emails or newspapers while driving, or better, queuing in traffic jam. Self-driven car is also a blessing to the elderly or the handicapped. They can now move around and have a more sociable life. Thus the autonomous vehicles may have greater social impact than just free people from driving.
To achieve that, lots of things needs to be considered. Apart from driving lessons the robots need to take before they can drive safely, extra attention should be paid when there is people sit inside a robot driven car. This is due to the fact that human bodies are far more fragile than the metallic car bodies. During a sharp brake or turn, the cars don’t feel pain, but people do.
For me, it works when there is a button that can turn the robot off. I can enjoy the fuss free time with the robot taking the wheel during the traffic jam while still be able having fun driving by switched it off.
I'm a fan of cars. When I was asked to do a blog on robots, the first thing came to my mind was to look for something to do with cars. I started by looking for “robots+car industry”. It is easy for one to imagine how important robots are to the automotive manufacturing. Indeed, from a source of Robotics Online, 90% of the robots working today are in the factories, and more than half of those are in automotive industry. So cars are built by robots. Then I pondered, is it possible for robot to drive cars. I went to do bit of research; to my surprise, lot of people are concerned about robot driven cars, or more scientifically, autonomous vehicles. Obviously, the people have the greatest interest are the military people, to be precise, U.S. Department of Defense (DoD). Irritated by lost of soldiers due to roadside bombs in Iraq for several years, DoD is particularly keen on autonomous vehicles. As a result, Defense Advanced Research Projects Agency (DARPA) was appointed to do the research so that by 2015, hopefully all the military vehicles in U.S. Army are driverless. The agency took a rather unconventional approach: a public competition with a $1 million prize was held in 2004, namely the Grand Challenge. The idea is to get autonomous vehicles from various research institutions and universities to compete against each other on the 132-mile course in the Mojave Desert. During the course of the competition, the vehicles are not allowed to have any communication with the people. The point of the challenge is however not for military use but to energize the engineering community to tackle the problems need to be solved before vehicles can pilot themselves safely at high speed over unfamiliar terrain.
106 teams took the challenge; none has made to the finishing line. Actually, none has gone beyond 7.4 miles, or 5% of the whole course. However, the competition was nothing close to a failure as objective of the competition was achieved, people were excited about the idea of driverless vehicles, and in the following year, 195 teams responded to the DARPA Grand Challenge 2005. This time, the Agency doubled the prize to 2 million. In the end, 5 teams have finished the 131.6-mile course and “Stanley”, a driverless VW Touareg from Stanford University clinched the championship at a elapsed time of 6 hours, 53 minutes and 58 seconds.
Although one needs only to control steering and throttle to get a car go as he wants, from the incidents of the Grand Challenge, it can be see that the task of driving a motor vehicle is not easy at all. The major difficulty that robots face is the way they see the world. The way they see the world is through measuring, using variety of sensors-laser sensor, cameras, radars, to gauge the shape, dimension, texture of the terrain ahead. They then use the data and process the data to get steering and throttle control in a way that to stay on road and avoid obstacles. Here are some of the techniques that used by various teams.
Laser sensing – The most common sensor are the laser sanners. A beam of light is emitted by the vehicle and bounced off by the terrain ahead. By measuring the time taken for the beam to return, the sensor can calculate the distance to objects and build a 3-D model of the terrain in front of the vehicle. The limitation is that each laser sensor can get only a narrow slice of the world. The detector can’t detect colors and may bounce off shiny surface like a body of water and thus gives a flawed 3-D model.
Video Cameras – video cameras are capable of capturing vast images that extend to a great distance. They can measure the texture and color of the ground, helping the robots understand where is safe to drive and alerts them when there is danger. However, it is difficult to judge the actual size and distance of the objects by using just one camera. They are also of little use during night or in bad weather.
Adaptive Vision – The concept is to get the vehicle run as fast as possible if a smooth road is detected for a distance long enough ahead of the vehicle. This is done by laser range finders to locate a smooth patch of ground and samples the color and texture of this patch by scanning the video image. It then matches the image with the road ahead to look for this color and texture to get a smooth road. If the road changes, the robot slows down until it figures out where is safe to drive.
Radar – Radar sends radio waves to a target and measure the return echo. The advantage of it is that they can see really far into the distance and the radio waves can penetrate dust clouds and bad weather. The downside is that radar beams are not as precise as lasers, resulting in objects that are not obstacles appear, confusing the robot.
Cost Map – This is the programming technique the robots use to find the road and avoid obstacles. The program compiles data from the sensors and divides the world into area that is safe to drive and area that is not safe. A map image is formed with colored area indicating degree of danger of the terrain ahead.
Path Planning – After the cost map is formed, the path planning program is used to find the best path from point to point. The robot figures out every possible path and compares every path on the cost map to find the best path.
Despite the combination of all the sensors used by various teams, unforeseen circumstances can immobilize the vehicle as the car needs to endure the roughness of the world but the sensors are precise instruments that often misled by external interference. The 3rd Grand Challenge is scheduled for 2007 and the racing will be held in the urban environment where the circumstances will get more complicated.
To be honest, I’m not so excited about having cars that can drive by themselves. I like to drive. I’m not trilled by the idea that deprives me of driving. However, the autonomous vehicles do have certain points. Firstly, it can reduce the road accidents, as the robot doesn’t get drowsy or drunk. It is a big deal as we are talking about saving lives. Moreover, precious time is saved as you can now read your emails or newspapers while driving, or better, queuing in traffic jam. Self-driven car is also a blessing to the elderly or the handicapped. They can now move around and have a more sociable life. Thus the autonomous vehicles may have greater social impact than just free people from driving.
To achieve that, lots of things needs to be considered. Apart from driving lessons the robots need to take before they can drive safely, extra attention should be paid when there is people sit inside a robot driven car. This is due to the fact that human bodies are far more fragile than the metallic car bodies. During a sharp brake or turn, the cars don’t feel pain, but people do.
For me, it works when there is a button that can turn the robot off. I can enjoy the fuss free time with the robot taking the wheel during the traffic jam while still be able having fun driving by switched it off.
Monday, April 10, 2006
Car-bot, the Grand Challenge
I'm a fan of cars. When I was asked to do a blog on robots, the first thing came to my mind was to look for something to do with cars. I started by looking for “robots+car industry”. It is easy for one to imagine how important robots are to the automotive manufacturing. Indeed, from a source of Robotics Online, 90% of the robots working today are in the factories, and more than half of those are in automotive industry. So cars are built by robots. Then I pondered, is it possible for robot to drive cars. I went to do bit of research; to my surprise, lot of people are concerned about robot driven cars, or more scientifically, autonomous vehicles. Obviously, the people have the greatest interest are the military people, to be precise, U.S. Department of Defense (DoD). Irritated by lost of soldiers due to roadside bombs in Iraq for several years, DoD is particularly keen on autonomous vehicles. As a result, Defense Advanced Research Projects Agency (DARPA) was appointed to do the research so that by 2015, hopefully all the military vehicles in U.S. Army are driverless. The agency took a rather unconventional approach: a public competition with a $1 million prize was held in 2004, namely the Grand Challenge. The idea is to get autonomous vehicles from various research institutions and universities to compete against each other on the 132-mile course in the Mojave Desert. During the course of the competition, the vehicles are not allowed to have any communication with the people. The point of the challenge is however not for military use but to energize the engineering community to tackle the problems need to be solved before vehicles can pilot themselves safely at high speed over unfamiliar terrain.
106 teams took the challenge; none has made to the finishing line. Actually, none has gone beyond 7.4 miles, or 5% of the whole course. However, the competition was nothing close to a failure as objective of the competition was achieved, people were excited about the idea of driverless vehicles, and in the following year, 195 teams responded to the DARPA Grand Challenge 2005. This time, the Agency doubled the prize to 2 million. In the end, 5 teams have finished the 131.6-mile course and “Stanley”, a driverless VW Touareg from Stanford University clinched the championship at a elapsed time of 6 hours, 53 minutes and 58 seconds.
Although one needs only to control steering and throttle to get a car go as he wants, from the incidents of the Grand Challenge, it can be see that the task of driving a motor vehicle is not easy at all. The major difficulty that robots face is the way they see the world. The way they see the world is through measuring, using variety of sensors-laser sensor, cameras, radars, to gauge the shape, dimension, texture of the terrain ahead. They then use the data and process the data to get steering and throttle control in a way that to stay on road and avoid obstacles. Here are some of the techniques that used by various teams.
Laser sensing – The most common sensor are the laser sanners. A beam of light is emitted by the vehicle and bounced off by the terrain ahead. By measuring the time taken for the beam to return, the sensor can calculate the distance to objects and build a 3-D model of the terrain in front of the vehicle. The limitation is that each laser sensor can get only a narrow slice of the world. The detector can’t detect colors and may bounce off shiny surface like a body of water and thus gives a flawed 3-D model.
Video Cameras – video cameras are capable of capturing vast images that extend to a great distance. They can measure the texture and color of the ground, helping the robots understand where is safe to drive and alerts them when there is danger. However, it is difficult to judge the actual size and distance of the objects by using just one camera. They are also of little use during night or in bad weather.
Adaptive Vision – The concept is to get the vehicle run as fast as possible if a smooth road is detected for a distance long enough ahead of the vehicle. This is done by laser range finders to locate a smooth patch of ground and samples the color and texture of this patch by scanning the video image. It then matches the image with the road ahead to look for this color and texture to get a smooth road. If the road changes, the robot slows down until it figures out where is safe to drive.
Radar – Radar sends radio waves to a target and measure the return echo. The advantage of it is that they can see really far into the distance and the radio waves can penetrate dust clouds and bad weather. The downside is that radar beams are not as precise as lasers, resulting in objects that are not obstacles appear, confusing the robot.
Cost Map – This is the programming technique the robots use to find the road and avoid obstacles. The program compiles data from the sensors and divides the world into area that is safe to drive and area that is not safe. A map image is formed with colored area indicating degree of danger of the terrain ahead.
Path Planning – After the cost map is formed, the path planning program is used to find the best path from point to point. The robot figures out every possible path and compares every path on the cost map to find the best path.
Despite the combination of all the sensors used by various teams, unforeseen circumstances can immobilize the vehicle as the car needs to endure the roughness of the world but the sensors are precise instruments that often misled by external interference. The 3rd Grand Challenge is scheduled for 2007 and the racing will be held in the urban environment where the circumstances will get more complicated.
To be honest, I’m not so excited about having cars that can drive by themselves. I like to drive. I’m not trilled by the idea that deprives me of driving. However, the autonomous vehicles do have certain points. Firstly, it can reduce the road accidents, as the robot doesn’t get drowsy or drunk. It is a big deal as we are talking about saving lives. Moreover, precious time is saved as you can now read your emails or newspapers while driving, or better, queuing in traffic jam. Self-driven car is also a blessing to the elderly or the handicapped. They can now move around and have a more sociable life. Thus the autonomous vehicles may have greater social impact than just free people from driving.
To achieve that, lots of things needs to be considered. Apart from driving lessons the robots need to take before they can drive safely, extra attention should be paid when there is people sit inside a robot driven car. This is due to the fact that human bodies are far more fragile than the metallic car bodies. During a sharp brake or turn, the cars don’t feel pain, but people do.
For me, it works when there is a button that can turn the robot off. I can enjoy the fuss free time with the robot taking the wheel during the traffic jam while still be able having fun driving by switched it off.
{kind=link}
Subscribe to:
Post Comments (Atom)
4 comments:
WANG LIWANG U0205321
I am also quite interesed, however there is no team can over take the challenge so far. Even when those car equited with advanced GPS, laser sensors, Radors etc. In some video that i watched, the car just turn to a rock and then blocked, and some can run much further. I still remember a car run along the road, but it turns to drive away from the main road. I think there are some problem with GPS and embeded sensors. More advanced may imply more restricted.
U0205239 Wang weiwei
The progress made so far is quite encouraging as 5 cars finished the Grand Challenge in 2005. Liwang, you are right that there is always problem with GPS and the sensors. It is interesting to know that some cars failed because they were confused by their own shadows. However, I believe it is possible to have cars that can drive by themselves safely. The 2005 Grand Challenge proved that it is technically possible. Lots of problem need to be solved though. Just to point out, the average speed of the fastest car in 2005 Grand Challenge is only 30km/h.
First of all: Great post !
I also like cars, especially off-road cars like the Volkswagen Touareg. But of course I like it since there are also drivers who are doing amazing jobs and mistakes, too.
I am usually marvelled after reading such articles about autonomous systems, but in this case one question came in my mind immediatly.
Why does the military need AUTONOMOUS vehicles of this size.
Do they want scenes like in Terminator? I mean the intention of saving lives, by replacing the normal patrol cars by driverless vehicles is creditable, but why autonomous vehicles ?
In my opinion a remote controlled vehicle could be much more effective than a robot.
In my opinion the DARPA's purpose of offering such a challenge aims more to the autonomous robotic soldier/tank/armoured vehicle than just to a 'patrol car'.
u0204999 Sim Xin'An Eddie
What a cool post and topic. I think this is quite an innovative way to get the public interested in what the Department of Defense does. I mean it generated public interest with a competition and the idea that a car could be driverless and reach its destination using just technology is a concept worth exploring not just from a military point of view. Who knows? Taxis might actually be driverless one day. I believe the technology used here is similar to the one used by NASA to power its vehicles in outer space especially its exploratory ones. The lasers and sensors help to generate a 3d map as well.
Post a Comment