Researchers from the Thayer School of Engineering at Dartmouth College have built a robot designed to do research in Antarctica.
The Environment:
The weather conditions are low snowfall, moderate winds, and extreme cold. The land is mostly plain aside from dune like features called Sastrugi. They are identifiable on satellite imagery. The snow is mostly firm , but also includes a few softer drifts. It also is capable of sustaining mobility in wind and able to operate at temperatures as low as -40°C.
The mission will include the robot being transported in an aircraft and dropped of at a certain location. The robot will then be required to travel over 500km in 2weeks to the target location where it can spend a 2-3 months looking data before returning to the base.
Keeping all these considerations in mind the team came up with the following design specifications:
Max. Speed > 0.80 m/s
Empty mass <> 15 kg
Ground Pressure

16x6-8 ATV tire are used as they are low mass and have good traction.the hubs for the tires were custom designed to meet the weight requirements. The custom wheels and hubs were designed to sustain the roughly 220N static load and 880 N dynamic load per wheel.
4 four EAD brushless DC motors combined with 90% efficient, 100:1 gear ratio planetary gearboxes were used. The gearboces were lubricated for -50°C operation. They provided continuous torque of roughly 8 N-m at each wheel.
Power:
Travel of 500 km in two weeks requires an average speed of 0.41 m/s.Average power required is 90 W. the robot also has a top speed of 8m/s requiring 180W. 40 W for housekeeping power, internal drivetrain resistance, and power system efficiencies is needed, this makes the total power needed about 250 W. The Antarctic is well suited for Solar powered vehicles. The plateau receives 224 hours sunlight and is subject to little precipitation and fog.
A dedicated 8-bit microcontroller coordinates the power system. The goal of the control scheme is to match the available power from the boost converters to the instantaneous demand of the motors and housekeeping.
Navigation and Control:
The path is generally plain and so a “Mixed Mode” operation which is based on human behavior for e.g. hiking a known path over a long distance. A local mode is also included so that the robot may react to unexpected situations.
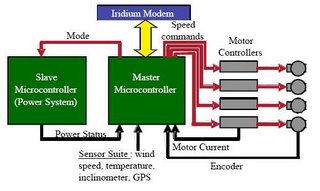
The robot’s microcontroller will communicate with a base station or through the Iridium Satellite System, which provides complete coverage of the Polar Regions.It allows operators to query robot status and send new target and waypoint data to the
robot, as well as allowing the robot to send warnings to the base station when it detects a potentially dangerous situation.
Four motor controllers provide closed-loop wheel speed control. While the motor controllers can also be set to torque control mode, leaving them in velocity control mode allows more sophisticated traction control through the master microcontroller. The master microcontroller has access to the four motor currents and encoded wheel speeds. The master microcontroller also handles navigation, sensor monitoring, GPS and communication.
Results:
The Robot was tested in Greenland which has similar conditions and will soon be tested in Antarctica itself. NASA is interested in testing the robot for its cost effective design to look for bacteria in Antarctica. Other potential missions include deploying arrays of magnetometers, seismometers, radio receivers and meteorological instruments, measuring ionosphere disturbances through synchronization of GPS signals, using ground-penetrating radar (GPR) to survey crevasse-free routes for field parties or traverse teams, and conducting glaciological surveys with GPR. Robot arrays could also provide high-bandwidth communications links and mobile power systems for field scientists.
 16x6-8 ATV tire are used as they are low mass and have good traction.the hubs for the tires were custom designed to meet the weight requirements. The custom wheels and hubs were designed to sustain the roughly 220N static load and 880 N dynamic load per wheel.
4 four EAD brushless DC motors combined with 90% efficient, 100:1 gear ratio planetary gearboxes were used. The gearboces were lubricated for -50°C operation. They provided continuous torque of roughly 8 N-m at each wheel.
Power:
Travel of 500 km in two weeks requires an average speed of 0.41 m/s.Average power required is 90 W. the robot also has a top speed of 8m/s requiring 180W. 40 W for housekeeping power, internal drivetrain resistance, and power system efficiencies is needed, this makes the total power needed about 250 W. The Antarctic is well suited for Solar powered vehicles. The plateau receives 224 hours sunlight and is subject to little precipitation and fog.
A dedicated 8-bit microcontroller coordinates the power system. The goal of the control scheme is to match the available power from the boost converters to the instantaneous demand of the motors and housekeeping.
Navigation and Control:
The path is generally plain and so a “Mixed Mode” operation which is based on human behavior for e.g. hiking a known path over a long distance. A local mode is also included so that the robot may react to unexpected situations.
16x6-8 ATV tire are used as they are low mass and have good traction.the hubs for the tires were custom designed to meet the weight requirements. The custom wheels and hubs were designed to sustain the roughly 220N static load and 880 N dynamic load per wheel.
4 four EAD brushless DC motors combined with 90% efficient, 100:1 gear ratio planetary gearboxes were used. The gearboces were lubricated for -50°C operation. They provided continuous torque of roughly 8 N-m at each wheel.
Power:
Travel of 500 km in two weeks requires an average speed of 0.41 m/s.Average power required is 90 W. the robot also has a top speed of 8m/s requiring 180W. 40 W for housekeeping power, internal drivetrain resistance, and power system efficiencies is needed, this makes the total power needed about 250 W. The Antarctic is well suited for Solar powered vehicles. The plateau receives 224 hours sunlight and is subject to little precipitation and fog.
A dedicated 8-bit microcontroller coordinates the power system. The goal of the control scheme is to match the available power from the boost converters to the instantaneous demand of the motors and housekeeping.
Navigation and Control:
The path is generally plain and so a “Mixed Mode” operation which is based on human behavior for e.g. hiking a known path over a long distance. A local mode is also included so that the robot may react to unexpected situations.
2 comments:
U0205077 Mu Jun
I heard this kind of news, and was not surprised at all because robots have already been sent to Mars for exploration. I think the difficult part of these cool robots is to overcome the cold weather, i.e. ensuring the robots work in the extreme cold environment.
U0204808 Li Junsheng
Such a robot should certainly not be confined to the exploration of Antartica alone; the ability to withstand extreme weather conditions and travel great distances should make it useful in the exploration of other planetary surfaces. However, the power requirements and how it obtains them is a concern, on planetary surfaces where solar power may be out of the question, other means of powering and sustaining the robot would be necessary.
Post a Comment