 Enter the
Transfer Tank Longitudinal Sealer (TTLS). -->
This is an evolved version of the Longitudinal Crack Sealing Machine (LCSM). (Below)
Enter the
Transfer Tank Longitudinal Sealer (TTLS). -->
This is an evolved version of the Longitudinal Crack Sealing Machine (LCSM). (Below)
{kind=link}
 This machine consists of a long robotic arm equipped with visual sensors, which sends information to the driver. The operator can then, from the comfort and safety (and aircon) of his seat, communicate with the machine through a simple user interface. The operator just needs to position the arm over a crack on the road, and the machine will take care of the rest. The arm will then take over, tracing and sealing the fissure on its own while the driver drives alongside it, monitoring the activity from the safe confines of a large truck.
Another machine is the Operator Controlled Crack Sealing Machine (OCCSM).
This machine consists of a long robotic arm equipped with visual sensors, which sends information to the driver. The operator can then, from the comfort and safety (and aircon) of his seat, communicate with the machine through a simple user interface. The operator just needs to position the arm over a crack on the road, and the machine will take care of the rest. The arm will then take over, tracing and sealing the fissure on its own while the driver drives alongside it, monitoring the activity from the safe confines of a large truck.
Another machine is the Operator Controlled Crack Sealing Machine (OCCSM).
 How It Works:
How It Works:
Sealing A special sealant applicator that deploys a pressurized reservoir is developed to allow for high speed sealing operations and automation. This means, a reservoir of sealant is place over the crack, and then pressure is applied to ensure that the sealant moves to fill up the crack. Since the sealant reservoir must be kept at a constant level (so as to fill up the crack regardless of the crack depth and width), the sealant pump output is regulated with a reservoir level feedback controller constantly maintaining the set reservoir level regardless of crack demand. This application technique has proved to be successful, completely filling up cracks at a speed of 8km/h. Vision System As stated, there were visual sensors on the robotic arm. This provides real-time images of the workspace for crack detection and path planning. The images are routed to the operator, where he will be able to get them by simply opening a browser (not unlike your internet browser). Motion and I/O Control System
The motion control system handles the two-axis (R-θ) motion of the telescopic arm. This node of the distributed control network is a stand-alone 2-axis motion controller with a built-in 100 Mbps fast Ethernet port. The I/O subsystem controls the pump of the sealent melter, the heaters, and the sealent head lever. It is also a stand-alone controller with 100Mbps ethernet port. Unlike the motion controller which can store and execute customer programs, the I/O controller uses a memory map for customizing temperature alarms and events which are used to control the heaters, and customizing a PID loop to control the pump proportional to the head level. All these critical tasks are conducted by the controller and real-time is ensured.
User Interface
Programmed in Visual C++, the user interface can be run on any PC, provided ethernet/Wi-Fi connection is available. The software is developed such that it is object-oriented and multithreaded, which makes the graphical interface rich in features (required by complex systems such as this), and always responsive (important for real-time control). This user interface allows the operator to perform all controls to the machine.
Path Planning
The graphical interface makes path planning interactive and allows many other functions. The operator can choose from a whole list of methods for finding the path. He can even combine the methods, and such flexibility allows the him to find the path for virtually any crack, effectively and accurately. Since fully automated crack recognition is time-consuming and not dependable, the operator can interfere and point out the start and end of the crack, avoiding the necessity to scan the whole image. A C++ program makes use of this to find the entire crack, only the start and end points of the cracks are needed as inputs. Raw paths from free hand and some other planning methods are normally not smooth which can result in jerky motions by the telescopic arm (for sealing). These jerky motions will lead to rough seals. The system encompasses curve fitting to smoothen out the edges. Nice.
Control Panel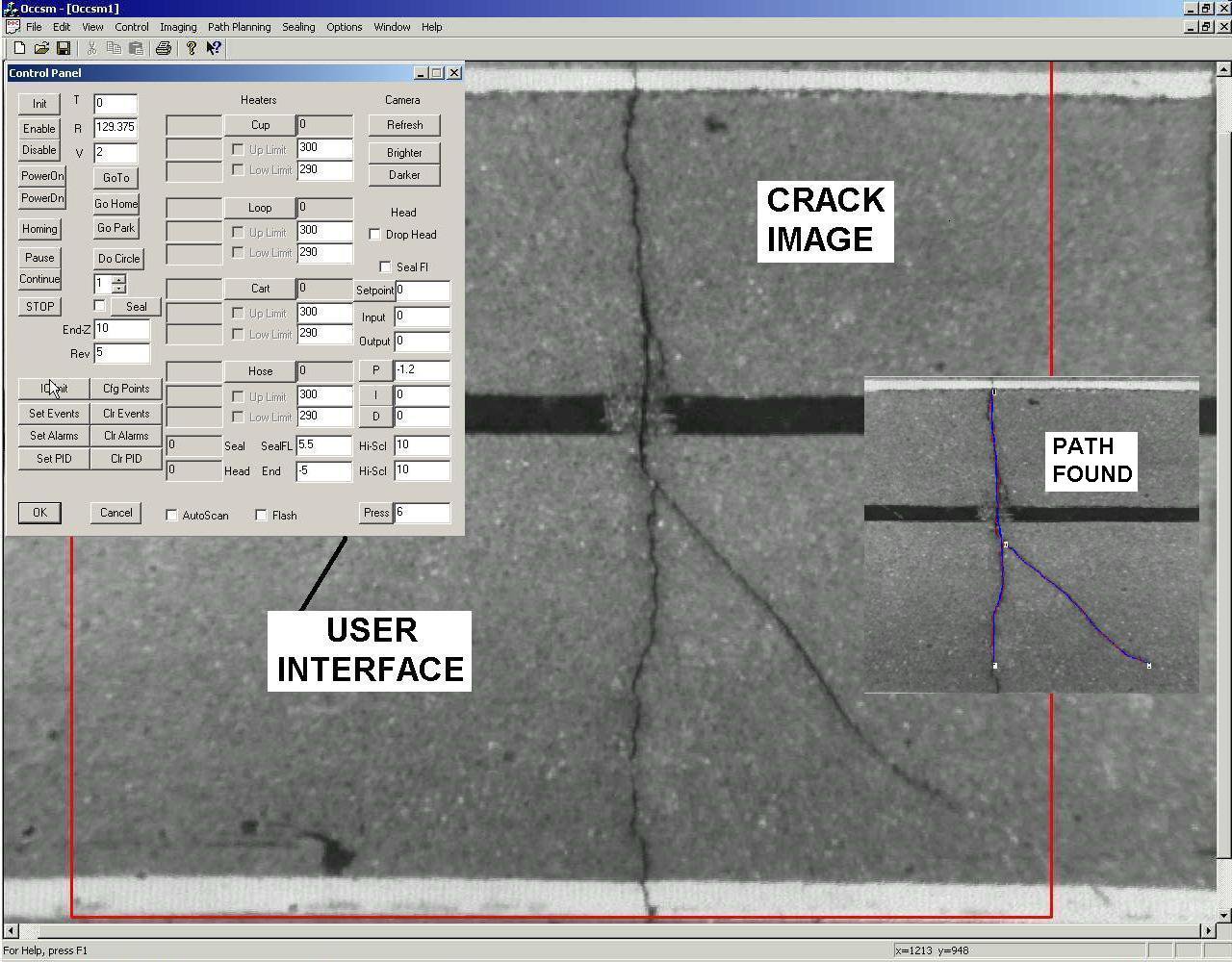
The control panel is a modeless dialog box, meaning it is always on screen, but permits other user activites on the main window. Because of this, the operator can control and monitor the system within the control panel and do other things such as path planning within the main window. The entire user interface is always unblocked (top of screen), so the operator always has control of the system. This is very important for real-time control programming. In cases of emergencies, it is of utmost importance that the operation can be stopped immediately, especially when the machine is working adjacent to traffic.
Conclusion
The implementation of the cracks sealing robots has proved beneficial. I don't think such technology is in use in Singapore yet. However, from the statistics, this will prove much more efficient and cheaper (and less annoyance to road users) in the long run.
Statistics: (LCSM vs Manual)
No of employees: 3(LCSM), 4(Manual)
Avg miles/day: 3.5(LCSM), 0.8(Manual)
Bare Rate Cost: $4017(LCSM), $23820(Manual)
Road Closures: No(LCSM), Yes(Manual)
Employees on foot?: No(LCSM), Yes(Manual)
I hope someone from LTA reads this and use this wonderful system to alleviate the sufferings of motorists. Haha. Save $$, Save Time, Save Lives. How wonderful is that!
References:
http://www.ahmct.ucdavis.edu/index.htm?pg=HomePage
http://www.its.berkeley.edu/itsreview/ITSReviewonline/spring2003/trb2003/bennett.pdf
6 comments:
U0307654 Lian Weiwen, Mervyn
Upon reading this article, I do agree that it is rather dangerous for workers to conduct road repairs on the road, especially when there is high speed traffic on the road. Indeed, this robot does seem to improve safety.
Unfortunately, the traffic jams I encounter (recently) on a daily basis are due to the construction of the circle line. :( My path to NUS everyday brings me to 2 long stretches of road and one more shorter stretch of road which are under construction for the circle line and traffic had to be diverted or rerouted to accomodate the construction. I really wish that this robot could fix that too. :D By the way, are road cracks in Singapore a common phenomenon? I don't seem to notice many road cracks in Singapore where we do not experience the four seasons. Maybe I should be more observant.
U0307717 Chew Jian Qiang
Well, such things can't be helped. Reconstruction works, widening of roads, laying pipes, accidents, vehicle breakdown, IT fairs... all these constitute to the super annoying traffic jams.
As for the construction of the circle line, well, there are other robots that are in use to shorten the time to build. Soon it'll be over. haha. How soon is the question.
A small pothole on the road is also a crack. The roads near industrial areas and those where heavy vehicles usually traverse are the common potholes-prone area. Imagine having more than 10tonnes running through the road every few minutes... You can even feel the earth shake. And getting mowed down by such large vehicles is even worse. I shudder to think of it.
U0300641 Yeo Choon Wee
If in terms of pure cracks, I think this robot will be useful for countries where the movement of earth crust is more prominent to create cracks. It is a useful creation as it saves manpower cost and road down times in those countries. Locally, cracks are mainly due to soil movement which is dominant in construction site. That is why safety measures and checks are in place. I'm not too sure if there are many cracks here thou since I take public transport.
Its true that some potholes in industrial area are really big thou but is the robot able to fill the such deep potholes?
U0307717 Chew Jian Qiang
Yup, like what I wrote in the part under "Sealing", the sealant applicator would create a sealant reservoir in the crack.
An analogy is filling up a glass full of pebbles with mud (or any viscous liquid). The applicator would make sure the whole crack is covered, like making sure the glass is filled to the brim.
Then pressure will be applied to force the sealant into the pores (or smaller holes) in the crack itself. Its just like forcing the mud in between the pebbles.
The applicator will make sure the sealant reservoir is always present (analogous to the glass always being filled to the brim).
Once the inner holes/cracks are filled up, the vehicle will move on to the next crack.
Of course, unless the hole is really big, as if the road has been pulled apart few metres apart. Then we'll need to close the whole road to investigate further damages.
This robot can really improve the safety of the workers repairing the road. But was wondering how long does it take for the robot to repair the cracks? Is it in minutes or hours? Another question that pop up my mind is that, is there a limit to the minimum size of the holes or cracks that the robot can detect and repair? Does the vechicles need to drive slowly during the repair? If that is the case, wouldn't it cause traffic jam as well?
But must admit that this is a great invention. It may be a good news or bad news for the road workers.
Dennis Prange N050935U
For those who are interested in road maintenance :-).
Another article (posted by me) can be found under the following link:
http://i-heart-robots.blogspot.com/2006/04/in-future-traffic-jam-can-be-more-than.html
It is about help and increase of safety during repairs which have to be done by human beeings.
Post a Comment