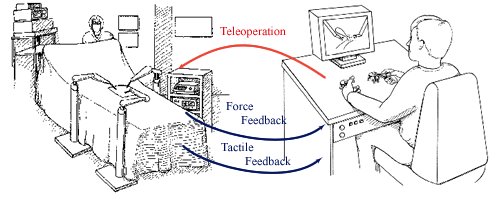
To increase the dexterity, a 6 DOF slave manipulator will be controlled through a 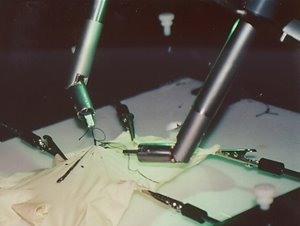 spatially consistent and intuitive master. The force feedback to the master will increase the fidelity of the manipulation and the tactile feedback will restore the tactile sensation. The workstation will incorporate two robotic manipulators with dexterous manipulation and tactile sensing capabilities, master devices with force and tactile feedback, and improved imaging and 3D display systems, all controlled through computers. This system is both highly dexterous and intuitive to use.
spatially consistent and intuitive master. The force feedback to the master will increase the fidelity of the manipulation and the tactile feedback will restore the tactile sensation. The workstation will incorporate two robotic manipulators with dexterous manipulation and tactile sensing capabilities, master devices with force and tactile feedback, and improved imaging and 3D display systems, all controlled through computers. This system is both highly dexterous and intuitive to use.
In the procedure for MIS of the abdomen, for example, a laparoscope is inserted with a cannula through a 10 mm incision in the abdominal wall. A CCD camera mounted on the laparoscope transmits the image to a CRT monitor is viewed by the surgical team. Several instruments such as graspers are inserted through separate cannulas. A commercial voice-actuated manipulator is also available to control the laparoscope.
References:
1) http://robotics.eecs.berkeley.edu/medical/
2) L. W. Way, S. Bhoyrul, and T. Mori, Fundamentals of Laparoscopic Surgery, Churchill Livingstone, 1995.
6 comments:
Mai Kaojie u0307803@nus.edu.sg
Just a additional point to add. Telesurgical workstaion can allow a doctor to perform surgery on this patient at this location from another location. For example, a operation in India can be performed by a doctor in the U.S with remote access to the telesurgical workstation.
Lee Kaizhao U036122x
Before anyone of you become sceptical of use of robotic telesurgery, I will like to mention some advantages of robotic surgery.
Surgical robots will be able to accomplish what it once took a crowd of people, including surgeons, anaesthesiologist and several nurses, to perform. Moreover, as mentioned by Kaojie, such tele-surgery can be operated from a distance. Hence, having fewer personnel in the operating room and allowing doctors to operate on a patient long-distance could lower the cost of health care in the long run. Talk about being operated by a ‘cheap but competent surgeon from a different country’!
Robotics can also decrease the fatigues that plague surgeons who operated for many hours. Moreover, the steadiest of human hands cannot match those of a surgical robot.
Hopefully, in the future, Singapore can conduct certain operations using robotics.
Indeed! I agree that develeopment of robotics in medicinal area as such has mainly pros and fairly few cons.
The art of telesurgery is a classical step towards globalization by "shrinking" the world through instant communication via Wi-Fi. Also, laparoscopic surgery improves healing time of the patient due to the small aperture(s) created during then operation.
However, the surgeons would have to undergo intensive trainings to familiarize themselves with these machines as a lot of senses and intuition used in the old-school method would be impaired, and putting the patients under certain risks.
Improvements definitely need to be made, such as: creating more intelligent robotic devices, in which their motions are as human-like as possible -- precision is utmost essential.
But it is to think about: even when these intelligent robotic devices can be created to the extent of human equivalence, can humans then be removed from the equation?
Chew Yiping U036736A
Hi...
I agree with Chew Yiping about the trainings necessary for the surgeons, as well as the need for the creation of more intelligent robotic devices.
Apart from these, I think there is also a call for reducing the reaction time of robots as humans send control signals, as this could greatly affect the performance of the robot and the surgery in general.
And to answer ur question as to whether humans can be removed from the entire equations - I do not think that is possible atleast as of now. Mainly because robots, however human-like in performance, cannot react to atypical situations like human beings. Especially considering that human lives could be at stake, it is very difficult to leave a life completely at the stake of a robot.
- Gayathri Shankaranarayanan
U036611E
Tan Shunpeng U036051B
Dear all, the use of robots to perform surgery is indeed a great leap forward in medical science. I am quite hopeful that more progress will be seen in this area in the coming years.
Doing surgery with a robot is indeed new but also putting a person's life at stake is not what we want in the world today. A robot doing the surgery it could happen but what could you get out of it. Sending signals to the robot and for the patient. Do you know what's best?
Post a Comment