 Recent times fall upon eager enthusiasm of the scientific community to explore other planets and moons in the solar system. With the Cassini space craft inspecting Saturn and its moon Titan and with various plans to explore and even terraform Mars, many minds around the world are dedicating to developing robots and algorithms to achieve such exploration on a feasible and efficient scale. The following is just my idea of bringing together many technologies and concepts that have been previously proposed. The materials present here are all referenced from http://www.techbriefs.com/.
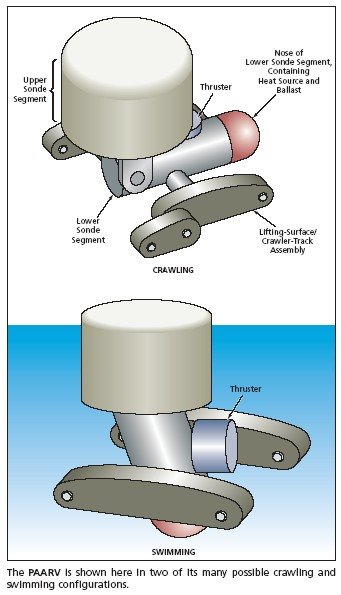
I believe using multiple robots with various forms of locomotion not confined to just solid ground would be most advantageous for exploration. For terrestrial exploration, why not use amphibious robots? The Planetary Autonomous Amphibious Robotic Vehicle (PAARV), in its prototype stage, is a merging of prior ice-penetrating exploratory robots and the designs of drop sondes used on Earth for scientific and military purposes [1].
Recent times fall upon eager enthusiasm of the scientific community to explore other planets and moons in the solar system. With the Cassini space craft inspecting Saturn and its moon Titan and with various plans to explore and even terraform Mars, many minds around the world are dedicating to developing robots and algorithms to achieve such exploration on a feasible and efficient scale. The following is just my idea of bringing together many technologies and concepts that have been previously proposed. The materials present here are all referenced from http://www.techbriefs.com/.
I believe using multiple robots with various forms of locomotion not confined to just solid ground would be most advantageous for exploration. For terrestrial exploration, why not use amphibious robots? The Planetary Autonomous Amphibious Robotic Vehicle (PAARV), in its prototype stage, is a merging of prior ice-penetrating exploratory robots and the designs of drop sondes used on Earth for scientific and military purposes [1].

In addition, the PAARV can be made to carry such miniature robot submarines as the miniature autonomous submersible explorer (MASE), that are built to explore extreme environments such as sub-glacial lakes, deep-ocean hydrothermal vents, acidic or alkaline lakes, brine lenses in permafrost, and ocean regions under Antarctic ice shelves [2].
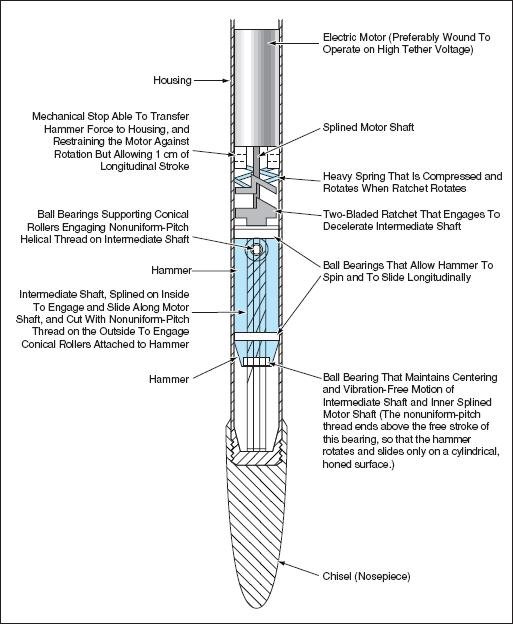 For subsurface exploration, robots such as the Subsurface Explorer (SSX) that uses a mechanism similar to an optimized jackhammer can be deployed when necessary [3].
For subsurface exploration, robots such as the Subsurface Explorer (SSX) that uses a mechanism similar to an optimized jackhammer can be deployed when necessary [3].
Now the crucial question: how does one determine when and where each of these robots is necessary? It would be easy to say, “Survey an area first, analyze the obtained data and carry out further explorations”. However, what if radio communication with earth is not always available? One solution may be to enhance communication networks by employing multiple relay points from ground units as well as airborne drones. Systems such as "Bioinspired Engineering of Exploration Systems" (BEES) [4] can be used, which mimic natural explores like honey bees to develop algorithms.
 A more robust system would be to actually assign the role of leader to a drone and let the companion of robots act as a ‘herd’ in exploring the terrain [5]. The designated leader would issue commands to move the robots to different locations or aim sensors at different targets to maximize scientific return. Here, a potential field approach can be used to identify places of interest and obstacles and map them to an artificial ‘field map’, and genetic algorithm can be employed such that the herd could be regarded as consisting of a set of artificial creatures that evolve to adapt to a previously unknown environment. The development of this exploration method is still underway and theoretical testing is being carried out.
A more robust system would be to actually assign the role of leader to a drone and let the companion of robots act as a ‘herd’ in exploring the terrain [5]. The designated leader would issue commands to move the robots to different locations or aim sensors at different targets to maximize scientific return. Here, a potential field approach can be used to identify places of interest and obstacles and map them to an artificial ‘field map’, and genetic algorithm can be employed such that the herd could be regarded as consisting of a set of artificial creatures that evolve to adapt to a previously unknown environment. The development of this exploration method is still underway and theoretical testing is being carried out.
[1] Mobile Robot for Exploring Cold Liquid/Solid Environments
[2] Miniature Robotic Submarine for Exploring Harsh Environments
[3] Sub-surface Explorer Robot with
[4] Cooperative Lander-Surface/Aerial Microflyer Missions for Mars Exploration
[5] Controlling Herds of Cooperative Robots
1 comment:
This post is definitely long and complex =p
But i guess, to really conquer and own the whole 'world', simple and single units might not be the way to go. We definitely need a team of smart 'people' to do that.
The owner of the post has touched on various issues, and more importantly the communications between the various devices. He suggested a central 'leader' that will be smart enough to order the other devices around to accomplish a task.
He also suggested using devices with specific capabilities, and such usage will be determined by the central 'leader', which get its command from Earth.
With optimization programs improving rapidly, I think in the the relatively near future we might expect to see this complete and capable team being a reality.
Post a Comment