 ROBART III is the third generation security robots with addition of threat-response capability to the detection and assessment features, which has drawn tremendous military interest in Law Enforcement and Operations Other Than War. There are three subsystems employed on ROBART III according to their purpose and functionalities: (1) mobility and navigation; (2) threat detection and assessment; (3) non-lethal response; and (4) high level control. Each of these will be briefly discussed below.
ROBART III is the third generation security robots with addition of threat-response capability to the detection and assessment features, which has drawn tremendous military interest in Law Enforcement and Operations Other Than War. There are three subsystems employed on ROBART III according to their purpose and functionalities: (1) mobility and navigation; (2) threat detection and assessment; (3) non-lethal response; and (4) high level control. Each of these will be briefly discussed below.
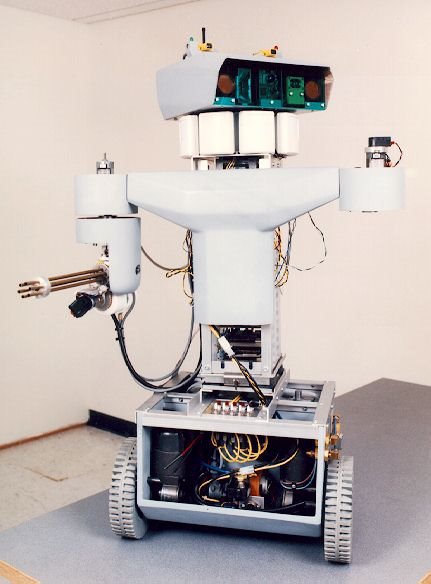
1. Mobility And Navigation ROBART III is designed only for indoor operation on relatively smooth planar floor surfaces. Differential steering is employed with a single passive caster in the rear of the platform directly behind the battery compartment. The left and right drive wheels are 8-inch wheelchair snow tires (see Figure 1) driven by a pair of 12-volt motors.
2 Threat Detection And Assessment The initial detection is accomplished by a 360-degree staring array of eight passive-infrared (PIR) motion detectors arranged as a collar ring just below the head. The head could detect any alarm zone and a black-and-white video surveillance camera would survey the scene. Subsequent motion is detected with a reconfigurable video line digitizer. There are additional head-mounted security sensors support the intelligent security assessment algorithm in rejecting nuisance alarms

3 Non-Lethal Response The non-lethal-response weapon chosen for incorporation on ROBART III consists of a pneumatically powered dart gun capable of firing a variety of 3/16-inch diameter projectiles, including tranquilizing darts. A rotating-barrel arrangement (Figure 2) is incorporated to allow for multiple firings (six) with minimal mechanical complexity.
4 High Level Control The seven low-level microprocessor-based controllers installed on ROBART III will be interfaced via a high-speed multi-drop RS-232 interface as slaves to a master 68HC11 controller.
In summary, ROBART III incorporates a non-lethal response capability into a body of robotic mobility, navigation, and threat detection and assessment techniques. The system will be able to confront intruders with a laser-sighted six-barrel tranquilizer dart gun, remotely controlled by a human operator. The system simplifies the operator's difficult coordination task of simultaneously controlling vehicle movement and attitude, pointing the camera, and aiming and firing the weapon. This will be accomplished by onboard intelligence which uses the inputs of various sensors including video motion detection to detect intruders, filter out false alarms, and automatically track a moving target.
U037130N, Li Chao
Reference: http://www.nosc.mil/robots/land/robart/spie96.html
11 comments:
it sounds very good! so maybe it could be used for protecting cashbox of the banks or protecting any important information, such as national secrets...
by U037157M Yi Jinzhou
This is awesome... Imagine how the crooks react after seeing the gatling gun attached to the robot.. Perhaps this can be used in military.
Tng Thomson
Yeah, definitely it could used to protect the cashbox and in the army. but it need a better algorithm which works 100% to differentiate enimies and friends, or else it can be a disastor. It has a gun, no kidding...
Li Chao U037130N
wah!! if they can do all these stuff, then lots of people will lose their job. But since it is for security use, it is better to use robotics rather than human ...
I do not think that any algorithm can make them differentiate enimies and friends 100%, even humans can not do that, unless they can read people's mind...
by U037121E Liu Pengyin
yeah, making people jobless is the common problem for robots, I guess. but hopefully it can create more high level job such as design and implement more smart robots.
It is true that no algorithm can assure 100% accuracy. So safety is important when using robots. No one want to be hurt by a robots with gun.
Li Chao U037130N
I tink such awesome robots have taken up too many job opportunities from us..US!! jobless fresh graduates..
U036546A Wu Lihua
This is a case of putting all your eggs in one basket. What we need isn't Robocop, it's better interoperability between a separate group of security systems dedicated to their respective functions (image capture, object tracking, identification, etc). Cut the power source to this hunk of metal here, and your security is completely gone.
Heng Kuan Yen
U037795M
This robot sounds awesome however it looks a bit big and required a considerable amount of space to maneuver. In addition, how flexible and agile is the robot? What happens if the intruder manages to get onto the back of the robot where it cannot engage with the weapon on the arms? Maybe this robot should be equipped with an electrostatic armed body to give intruders an electric shock when necessary. This would also prevent unauthorized access to the robot which could be disabled remotely definitely.
Ng Buck Sin
U046233B
Threat assessment seems to be very ambigious. Evaluating something like that is not easy even for humans. A simple scenario like a night security in a bank or a war, where anything that moves is a threat might be an ideal application of this.
Identification of friend or foe for more complex situations could be done though some radio based technology like Identification Friend or Foe (IFF) used in military aircraft.
Harish Kumar Koundinya
U037793N
Oh my god, there's so much useful material in this post!
Post a Comment